Avec l’avènement et le développement rapide des technologies
numériques, les données sont devenues à la fois un bien
précieux et très abondant. Cependant, avec une telle
profusion, se posent des questions relatives à la qualité et
l'étiquetage de ces données. En effet, à cause de
l’augmentation des volumes de données disponibles, alors que
le coût de l'étiquetage par des experts humains reste très
important, il est de plus en plus nécessaire de pouvoir
renforcer l’apprentissage semi-supervisé grâce l'exploitation
des données non-labellisées. Ce problème est d’autant plus
marqué dans le cas de l’apprentissage multi-labels, et en
particulier pour la régression, où chaque unité statistique
est guidée par plusieurs cibles différentes, qui prennent la
forme de scores numériques.
C'est dans ce cadre fondamental, que s'inscrit cette
thèse. Tout d'abord, nous commençons par proposer une méthode
d’apprentissage pour la régression semi-supervisée, que nous
mettons à l’épreuve à travers une étude expérimentale
détaillée. Grâce à cette nouvelle méthode, nous présentons une
deuxième contribution, plus adaptée au contexte
multi-labels. Nous montrons également son efficacité par une
étude comparative, sur des jeux de données issues de la
littérature. Par ailleurs, la dimensionnalité du problème
demeure toujours la difficulté de l'apprentissage automatique,
et sa réduction suscite l'intérêt de plusieurs chercheurs dans
la communauté. Une des tâches majeures répondant à cette
problématique est la sélection de variables, que nous
proposons d'étudier ici dans un cadre complexe:
semi-supervisé, multi-labels et pour la régression.
apprentissage semi-superviséapprentissage multi-labelsrégressionrégularisation Laplaciennesélection de variablessélection de labelsoptimisation
With the advent and rapid growth of digital technologies, data
has become a precious asset as well as plentiful. However,
with such an abundance come issues about data quality and
labelling. Because of growing numbers of available data
volumes, while human expert labelling is still important, it
is more and more necessary to reinforce semi-supervised
learning with the exploitation of unlabeled data. This problem
is all the more noticeable in the multi-label learning
framework, and in particular for regression, where each
statistical unit is guided by many different targets, taking
the form of numerical scores.
This thesis focuses on this fundamental framework. First, we
begin by proposing a method for semi-supervised regression,
that we challenge through a detailed experimental
study. Thanks to this new method, we present a second
contribution, more fitted to the multi-label framework. We
also show its efficiency with a comparative study on
literature data sets. Furthermore, the problem dimension is
always a pain point of machine learning, and reducing it
sparks the interest of many researchers. Feature selection is
one of the major tasks addressing this problem, and we propose
to study it here in a complex framework: for semi-supervised,
multi-label regression.
Finally, an experimental validation is proposed on a real
problem about automatic annotation of tires, to tackle the
needs expressed by the industrial partner of this thesis.
L'apprentissage automatique est une discipline de l'intelligence
artificielle qui consiste à extraire à partir de données
complexes, des connaissances utiles pour la prise de décision
dans différents domaines d'application. Ces données peuvent
êtres présentées sous différentes formes : observations, objets,
transactions, signaux, graphes, textes, etc.
L'apprentissage automatique à partir des données vise à extraire
des connaissances directement à partir des observations que l'on
peut effectuer de l'environnement. Selon le cadre d'application,
les observations peuvent être très différentes. Il peut s'agir
de textes et d'images, par exemple, afin d'effectuer de la
classification de documents textuels ou de la reconnaissance
d'images.
Dans ce contexte, le principe général consiste à effectuer une
modélisation statistique d’une fonction qui nous permet de
résoudre le problème abordé. Cette modélisation est jugée
pertinente si elle permet de généraliser la décision à de
nouvelles formes de données inconnues au modèle, a priori.
Dans le cadre de cette thèse, la modélisation que nous cherchons
à mettre en œuvre se présente sous la forme y = f
(x) où x représente les variables
explicatives du problème, par exemple les mots employés dans un
texte. y représente la variable cible à expliquer,
appelée aussi cible ou label, c'est-à-dire celle que l'on
cherche à expliquer : le ou les thèmes du document textuel.
Pour trouver cette fonction f, il y a plusieurs
régimes d'application. Si la variable cible est complètement
connue (pour toutes les observations), il s'agit d'apprentissage
supervisé. Si elle est inconnue, il s'agit d'apprentissage non
supervisé. Dans le cas qui nous intéresse, elle n'est que
partiellement connue, ce qui définit l'apprentissage
semi-supervisé.
Selon le type d'apprentissage envisagé, nous pouvons utiliser un
certain nombre d'algorithmes, c'est-à-dire une fonction qui à
partir des données construit une approximation du
modèle f. Dans le cadre qui nous intéresse ici,
l'algorithme consiste à minimiser une fonction de coût, en
cherchant le modèle parmi une certaine classe de fonctions. La
fonction de coût accumule donc les erreurs commises sur
l'ensemble du jeu de données. En la minimisant, l'objectif est
d'obtenir le modèle le plus adapté à la distribution des
données.
Par ailleurs, en apprentissage automatique, l'extraction de
variables permet de synthétiser l'information contenue dans les
caractéristiques du problème, de façon à en obtenir de nouvelles
où chaque observation est décrite différemment. L’utilisation de
ces nouvelles variables, souvent moins nombreuses, permet
d'effectuer une réduction de dimension. D'autre part, la
sélection de variables est un cas particulier, pour lequel
chaque variable obtenue est une variable de description de
l'observation, mais seules les variables pertinentes sont
sélectionnées. La sélection de variables a donc un avantage
considérable sur l'extraction de variables, puisqu'elle permet
d'avoir un modèle plus interprétable. Par exemple, dans le cas
de l'apprentissage à partir de données textuelles, elle permet
de sélectionner le champ lexical du thème qui nous intéresse, ce
qui est en soi un apport de connaissances.
La performance des algorithmes d'apprentissage en
classification, régression ou sélection de variables, s'évalue
sur les données n'ayant pas servi à la construction du
modèle. Si la fonction résultante f est performante
sur ces données, elle permettra de généraliser la connaissance,
et ainsi conduire à une décision fiable. Principalement, on
distingue deux obstacles qui s'opposent à la généralisation de
la fonction de décision : le sous-apprentissage,
pour lequel f ignore l'information utile des
données, et le sur-apprentissage, qui donne trop
d'importance au bruit dans les données. Le sous-apprentissage
est assez simple à détecter, puisque la fonction f
n'est pas performante sur les données connues.
Il est parfois possible de contrer l'effet du sur-apprentissage,
en introduisant une régularisation explicite dans l'algorithme
préconisé. Ainsi, celui-ci minimise l'erreur accumulée sur
l'ensemble des données, mais tente également de minimiser la
complexité du modèle sous-jacent. Une certaine définition de la
complexité du modèle informe le choix de la régularisation
employée.
Selon la nature de la variable cible, différents algorithmes
peuvent être envisagés. Dans le cas de la régression, cette
variable est de nature continue, contrairement à la
classification dans laquelle elle est discrète. De plus, dans le
cas d'un apprentissage multi-labels, l'espace de cette variable
cible s'élargit et rejoint celui des variables explicatives dans
toute sa complexité liée à la corrélation, au bruit et à la
difficulté à modéliser la fonction de décision avec de multiples
cibles, simultanément. C'est enfin, dans ce cadre complexe, que
s'inscrit l'aspect fondamental de cette thèse.
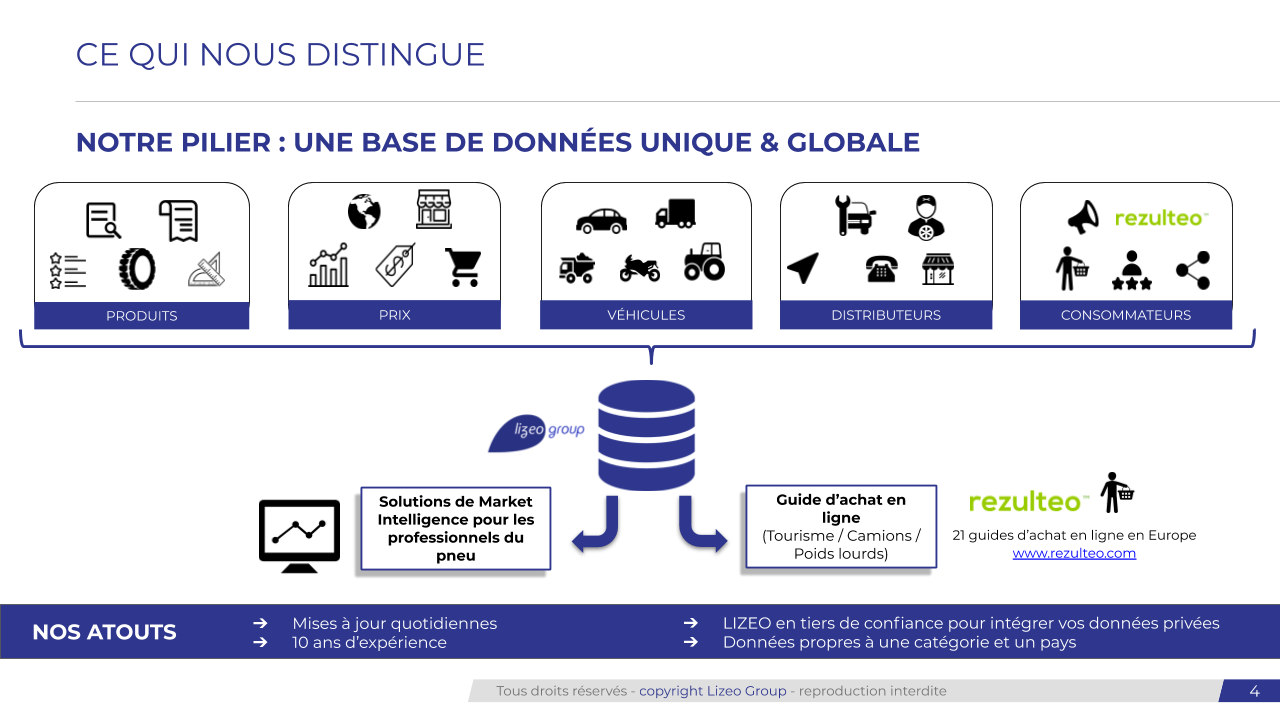
Sur l'aspect applicatif, cette thèse s’inscrit dans le cadre
d’une convention CIFRE entre le laboratoire LIRIS et la société
Lizeo IT du groupe Lizeo Cette thèse fait l'objet d'une
"Convention Industrielle de Formation par la Recherche" (CIFRE)
proposée par l’Agence Nationale de la Recherche Technique
(ANRT). Ce mode de financement consiste en un partenariat entre
une entreprise, ici Lizeo IT du groupe Lizeo et une université
(ici, l'université Claude Bernard Lyon 1 , UCBL).. En
effet, dans le cadre de ses activités, l'entreprise récolte de
nombreux documents textuels issus de multiples sources et
décrivant les qualités des pneumatiques, à travers un certain
nombre de caractéristiques étudiées pour les pneumatiques.
Chacune de ces caractéristiques représente un score
d'appréciation continu (sous forme d'une note) : ce sont donc
des variables cible, réelles. La connaissance extraite de ces
données d'appréciation sont d'une très grande importance pour
les manufacturiers et les distributeurs, mais l'annotation
manuelle est très délicate, puisqu'elle requiert des
connaissances vis-à-vis des produits, et coûteuse puisqu'elle
doit s'effectuer sur plusieurs critères différents. Par
conséquent, l'apprentissage doit s'inscrire dans le cadre
semi-supervisé pour la régression multi-labels.
Contributions
Tout d'abord, nous avons commencé à aborder le problème de la
régression dans le cadre mono-label. Pour ce faire, nous nous
sommes fondés sur deux algorithmes représentatifs de l'état de
l'art : SSSL (Simple algorithm for Semi-supervised
Learning, ) et celui de la
régularisation Laplacienne
. SSSL
effectue une régression simple après un changement d'espace des
données ; nous proposons de reprendre ce changement d'espace et
d'apporter une régularisation Laplacienne à la régression, pour
obtenir l'algorithme Laplacian-regularized Simple
Semi-Supervised Learning, ou LapS3L.
Nous avons proposé par la suite une adaptation
de LapS3L pour l'apprentissage multi-labels,
Laplacian-based Semi-supervised Multi-regression,
ou LSMR. L'idée principale de cette extension
consiste à imposer, au travers d'une régularisation, que les
labels similaires doivent être modélisés de manière similaire.
Nous avons également développé un algorithme de sélection de
variables multi-labels et semi-supervisé,
appelé RSMS pour Robust Semi-supervised
Multi-label feature Selection for regression. En effet,
dans le cas de l'apprentissage multi-labels, la sélection de
variables propose de sélectionner les variables utiles pour tous
les labels, simultanément. Cet algorithme de sélection de
variables introduit l'idée que la sélection de labels permet de
guider la sélection de variables.
Enfin, nous étions confrontés à un jeu de données textuel pour
la résolution d'un problème réel, qui consiste à évaluer
l'appréciation de diverses propriétés associées à des
pneumatiques dans des commentaires d'internautes. C'est la
raison pour laquelle nous avons développé un démonstrateur en
situation permettant d'adapter nos algorithmes ainsi développés
aux contingences de cette application à forte valeur ajoutée
pour l'entreprise.
Organisation du manuscrit
L'organisation de ce manuscrit suit l'ordre chronologique de nos
propositions. Dans le chapitre qui suit, nous dresserons un état
de l'art sur l'apprentissage semi-supervisé et multi-labels, en
s'intéressant également à la sélection de variables. Ensuite,
nous présenterons LapS3L
(Laplacian-regularised Simple Semi-Supervised
Learning), en décrivant les travaux utilisés, l'approche
proposée, l'algorithme d'optimisation retenu et l'étude
expérimentale mise en œuvre. Le chapitre 4 se consacrera à la
deuxième contribution, LSMR (Laplacian-based
semi-supervised multi-regression) qui est son extension
dans le cadre multi-labels. Le chapitre 5
présentera RSMS (Robust Semi-supervised
Multi-label feature Selection for regression), pour
répondre à la problématique de la sélection de variables, dans
le cadre semi-supervisé et multi-labels. Finalement, le chapitre
6 présentera l'application de nos travaux sur un jeu de données
réel, pour répondre à la problématique de l'entreprise sur
l'annotation automatique à partir de grandes masses de données
sur les pneumatiques. Enfin, nous conclurons ce rapport dans le
dernier chapitre avec un bilan sur les contributions proposées
et les résultats obtenus via les différentes expérimentations
menées durant cette thèse. Nous discuterons aussi quelques
propositions d'amélioration en guise de perspectives à court et
à moyen termes.
Notations
Les notations utilisées dans la suite de ce document sont
rappelées ici.
Voici les opérateurs employés :
M' désigne la transposée de
lamatrice M ;
\bar v désigne la moyenne d'un
vecteur v ;
M \otimes P désigne le produit de Kronecker
de M par P ;
M \succeq 0 ou M \in S_N^{+}
(\mathbb{R}) signifie que M est une
matrice symétrique réelle semi-définie positive.
Les notations suivantes sont employées pour la dimension du
problème d'apprentissage :
n_l : le nombre d'individus labellisés de
l'ensemble d'apprentissage ;
N : le nombre total d'individus, y compris ceux
non labellisés ;
n_t : le nombre d'individus de test ;
d : la dimension de l'espace des individus, ou
le nombre de variables ;
m : le nombre de labels ;
c : le nombre de classes pour un
classifieur ;
o : le nombre de pseudo-labels ;
s : le nombre de valeurs propres considérées,
par ordre croissant.
Nous utilisons ces notations pour écrire une fonction objectif :
b \in \mathbb{R}^{m} : le vecteur de biais pour
l'apprentissage de régression ;
B \in \mathbb{R}^{o, m} : le facteur à droite
dans la décomposition du modèle ;
\Gamma : les coefficients du modèle SSSL ;
D, D_s : la matrice de degré du graphe des
individus (l'indice s sert à la démarquer
de D_m) ;
D_m : la matrice de degré du graphe des
labels ;
D_W, D_B : matrices diagonales
pour la relaxation lisse de la norme l_{2, 1}
et l_{1, 2} ;
\epsilon > 0 : paramètre de la fonction de coût
de l'algorithme SVM (Support Vector Machine), ou
notation pour un nombre strictement positif pouvant être choisi
arbitrairement proche de 0 ;
L \in \mathbb{R}^{N, N}, L_s : la
matrice Laplacienne du graphe des individus ;
L_m \in \mathbb{R}^{m, m} : la matrice
Laplacienne du graphe des labels ;
M \in \mathbb{R}^{N, N} : la matrice
d'adjacence du graphe des individus ;
M_m \in \mathbb{R}^{m, m} : la matrice
d'adjacence du graphe des labels ;
P, Q : deux matrices décomposant un modèle W,
W = P + Q ou W = P Q ;
\mathcal{R} : lorsqu'une régularisation
quelconque s'applique sur un modèle W, nous la
noterons \mathcal{R} (W) ;
tr : fonction calculant la trace d'une matrice
(la somme des valeurs de sa diagonale) ;
V \in \mathbb{R}^{N, o} : une matrice de
pseudo-labels ;
V_l \in \mathbb{R}^{n_l, o} : les lignes
de V correspondant aux individus labellisés ;
\mathcal{V} : les individus du jeu
d'apprentissage pour SSSL ;
\mathcal{V}_t : le jeu de test pour SSSL ;
w \in \mathbb{R}^d : le modèle, sous forme de
vecteur de coefficients, pour un apprentissage mono-label ;
W \in \mathbb{R}^{d, m} : le modèle pour un
apprentissage multi-labels ;
y \in \mathbb{R}^{n_l} : le vecteur de labels
(pour de la régression mono-label) ;
Y \in \mathbb{R}^{n, m} : la matrice de labels,
de dimension N \times m. Elle contient des lignes
de valeur non spécifiée pour les individus non labellisés. De
dimension n_l \times m, il ne s'agit que des
individus labellisés ;
\hat Y \in \mathbb{R}^{n_t, m} : la sortie du
modèle pour la prédiction des labels d'un ensemble
de n_t individus ;
\xi, \xi^{*} : paramètres de marge
pour l'algorithme SVR (Support Vector
Regression) ;
X \in \mathbb{R}^{N, d} la matrice de données
servant pour l'apprentissage ;
X_l \in \mathbb{R}^{n_l, d} les lignes
de X correspondant aux individus labellisés.
Certains algorithmes utilisent un noyau. Les notations associées
sont :
\mathcal{H}_{\kappa} : espace de Hilbert à
noyau reproduisant ;
K \in \mathbb{R}^{N, N} : application de la
fonction de noyau à chaque paire d'individus ;
K_b \in \mathbb{R}^{N, n_t} : application de la
fonction de noyau à chaque paire (individu d'apprentissage,
individu de test) ;
\kappa \colon \mathcal{X} \times \mathcal{X} \to
\mathbb{R}, une fonction de noyau ;
\sigma > 0 : l'hyperparamètre de la RBF
(/Radial Basis Function/) ;
U \in \mathbb{R}^{N, s} : les vecteurs propres
de la matrice de noyau K.
Pour décrire un algorithme, nous utilisons les notations
suivantes :
M^{(0)} désigne une valeur initiale avant
itérations ;
\mathbf{1} : un vecteur dont toutes les
composantes sont égales à 1 ;
C \in \mathbb{R}^{m, o} : l'indicatrice des
clusters, vaut 1 si m est dans le
cluster o ;
C_W, C_V, C_B : la
constante de Lipschitz de la fonction de gradient vis-à-vis
de W, V et B ;
\mathcal{C} : un cluster ;
f, ou h : une fonction de
prédiction, prend en entrée un individu ou un ensemble
d'individus et retourne les valeurs de tous les labels pour
ces individus ;
i : indice d'itération d'individu ;
I : la matrice identité ;
j : indice d'itération de variables ;
k : indice d'itération de labels, ou nombre de
plus proches voisins ;
l : indice d'itération de pseudo-labels ;
\hat L_N : l'opérateur d'évaluation d'une
fonction de prédiction ;
\left(\hat \lambda\right)_{i = 1}^N les valeurs
propres de \hat L_N ;
\mathrm{min}, \mathrm{max} :
minimum et maximum d'un ensemble de valeurs ;
\mathcal{O} : notation pour la complexité
temporelle ou spatiale ;
p : indice de la norme de Minkowski ;
\left(\phi\right)_{i = 1}^ N les fonctions
propres de \hat L_N ;
\rho (M) désigne le rayon spectral
de M, c'est-à-dire sa plus grande valeur
propre ;
\mathcal {S} \subset \{1, ..., m\} les labels
sélectionnés ;
\sigma_i(W) : la iième
valeur propre de W ;
x_i,\quad i = \{1 ... N\} : un individu de
l'ensemble d'apprentissage ;
{x_l}_i,\quad i = \{1 ... n_l\} : un individu
labellisé de l'ensemble d'apprentissage ;
\hat y_i désigne la prédiction mono-label d’un
individu de test i ;
\hat Y_{i,k} désigne la prédiction d’un
individu de test i pour un
label k ;
z : le vecteur de label pour SSSL ;
\hat z : la prédiction pour SSSL.
Enfin, \mathcal{X} désigne l’ensemble
d’apprentissage ; dans tous les cas étudiés il s’agit d’un
espace réel de dimension d.
Nous rappelons également les normes utilisées :
la norme de Minkowski, pour un
indice p : \left\|x_i\right\|_{p} =
\left(\sum_{i = 1}^n \left|x\right|^p\right)^{\frac 1
p} ;
la norme l_2, cas particulier pour p =
2 : \left\|x\right\|_{2} = \sqrt{\sum_{i = 1}^n
\left|x_i\right|^2} ;
la norme l_1, autre cas particulier
pour p = 1 : \left\|x\right\|_1 = \sum_{i =
1}^n \left|x_i\right| ;
la norme matricielle l_{p, q} pour deux indices
de Minkowski, est la norme q du vecteur constitué
des normes p de chacune des lignes de la
matrice ;
la norme l_{2, 1} s'écrit donc pour une
matrice W \in
\mathbb{R}^{d,m} : \left\|W\right\|_{2, 1} =
\sum_{j = 1} ^ d \left\|W_{j, .}\right\|_2 ;
la norme l_{1, 1}
s'écrit : \left\|W\right\|_{1, 1} = \sum_{j = 1} ^ d
\left\|W_{j, .}\right\|_1 ;
la norme l_{1, 2} est la norme l_{2,
1} de la transposée ;
la norme de Frobenius l_{2, 2}
s'écrit : \left\|W\right\|_F = \sqrt{\sum_{j = 1}^d
\sum_{k = 1} ^ m W_{j, k} ^ 2} ;
la norme l_{2, 1 - 2} est la différence entre
la norme l_{2, 1} et la norme de Frobenius ;
la norme trace s'écrit : \left\|W\right\|_{*} =
\sqrt{tr \left(W' W\right)} = \sum_{i = 1} ^ m \sigma_i
(W), si \sigma_i (W) est
la iième valeur propre
de W.
État de l’art : Régression semi-supervisée multi-labels
Dans ce chapitre, nous dressons un état de l'art de
l'apprentissage de régression semi-supervisée et multi-labels.
Pour l'apprentissage semi-supervisé, nous détaillons diverses
approches qui peuvent utiliser les données non
labellisées. Nous commençons par les approches de pénalisation
utilisant la régularisation Laplacienne, puis son adaptation
dans le cadre de l'algorithme SVM, ainsi que les méta-méthodes
semi-supervisées : self-training
et co-training. Nous nous intéressons également à
la sélection de variables pour l'apprentissage semi-supervisé.
Nous nous concentrons ensuite sur la régression
multi-labels. On peut également traiter le problème de
régression multi-labels grâce à des méta-méthodes, mais aussi
des régularisations spéciales conçues pour l'apprentissage
multi-labels. Nous terminons ce chapitre par un exposé de la
sélection de variables multi-labels.
Régression semi-supervisée
Dans cette section, nous nous intéressons à la notion de
régression semi-supervisée. L'apprentissage semi-supervisé est
un sujet de recherche important. Le but est de tirer profit de
données non labellisées en plus des données labellisées, dans le
cas relativement fréquent où labelliser des données est très
coûteux, car ce processus nécessite la collaboration d'un
expert, alors que dans le même temps de grandes masses de
données non labellisées sont disponibles.
Les problèmes de régression peuvent aussi être traités dans ce
contexte d'apprentissage semi-supervisé. Ce cas dans lequel la
variable cible est continue suscite un intérêt différent du cas,
beaucoup plus fréquent, où la variable cible est discrète
(classification binaire ou multiple). Ainsi, de nombreuses
approches en apprentissage semi-supervisé sont d'abord pensées
pour une tâche de classification, ce qui parfois rend leur
adaptation plus difficile.
Apprentissage semi-supervisé
L'objectif de l'apprentissage semi-supervisé est d'exploiter les
données non labellisées, disponibles en abondance, pour
améliorer les performances en généralisation de
l'algorithme. Par exemple, prenons le cas du jeu de données
2-lunes (two moons, figure
). Dans ce jeu de données (en
haut), il n’y a que deux points labellisés. En ignorant les
points non labellisés, la classification donnerait le résultat
en bas à gauche, alors que le résultat en bas à droite semble
plus naturel.
Le jeu de données two moons
Ce problème de classification binaire semi-supervisée est assez
inintéressant au premier abord, puisqu'il ne propose qu'un seul point
par classe. Dans ce cas, n'importe quel algorithme de classification
binaire peut obtenir une erreur résiduelle nulle en traçant une zone
de séparation entre les deux points.
Cependant, le résultat n'est pas très intuitif. On s'attendrait
à ce que chacune des deux branches du jeu de données utilise la
même étiquette de manière cohérente, en utilisant la
justification suivante : dans les zones de points à haute
densité, toutes les étiquettes devraient être les mêmes.
Si le résultat de classification est différent, on ne peut
cependant pas affirmer qu'il sera meilleur. Cependant, comme
nous le verrons plus tard, certaines connaissances a priori de
cette nature peuvent donner de meilleurs résultats
expérimentaux.
Selon , il est
nécessaire de satisfaire plusieurs hypothèses pour améliorer la
performance de l'apprentissage, rappelées ici.
L'hypothèse de régularité semi-supervisée affirme
que la prédiction doit être plus lisse dans les zones à haute
densité que dans les zones à basse densité. Dans notre exemple
ci-dessus, les deux lunes sont des zones à haute densité ; la
prédiction ne doit donc pas varier rapidement dans cette
zone. En revanche, entre les deux formes lunaires se trouve une
zone à faible densité, où la prédiction peut très abruptement
basculer entre négatif et positif.
L'hypothèse de clusterisation affirme que si les
données se divisent en groupes, alors la prédiction doit être la
même sur tout le groupe. C'est principalement cette hypothèse
que nous aurions utilisée pour définir le résultat attendu de la
figure . Ce n'est pas exactement
la même chose que l'hypothèse de régularité. En effet, elle
n'exprime rien quant à la zone de séparation, et les
regroupements ne sont pas nécessairement les zones à plus haute
densité.
Finalement, l'hypothèse de manifold affirme que les
données vivent en réalité dans un espace de plus faible
dimension. C'est en effet le cas des données de la figure : on
pourrait paramétrer cet espace par un réel unique, qui
indiquerait sur quelle lune on se trouve et à quelle position.
L'intérêt d'un algorithme de régression semi-supervisée réside
donc dans le fait qu'il soit capable de tirer avantage de ces
hypothèses, au moyen par exemple de connaissances a priori
injectées dans le modèle. Dans la suite, nous allons voir
quelques exemples d'algorithmes qui utilisent ces hypothèses.
Notations
Pour garder une certaine cohérence dans la liste des méthodes
évoquées, nous définissons ici les notations employées pour
modéliser un problème d'apprentissage semi-supervisé.
Notations générales
Le problème d'apprentissage semi-supervisé consiste à apprendre
une fonction de prédiction, f, à partir des
données. Ces données sont modélisées comme des
points \left(x_i\right)_{i = 1} ^ N dans un
espace \mathcal{X}. Dans le cas des problèmes de
régression, on considèrera uniquement que les
individus \left(x_i\right)_{i = 1} ^ N sont des
vecteurs dans un espace \mathbb{R}^d,
où d est la dimension de l'espace. La fonction de
prédiction retourne un nombre réel, dans le cadre de la
régression. On a donc :
f \colon \mathcal{X} \to \mathbb{R}
Parmi cet ensemble d'apprentissage semi-supervisé, on peut en
extraire un sous-ensemble supervisé constitué de paires
\left({x_l}_i, y_i\right)_{i = 1} ^ {n_l} \in \mathbb{R} ^
d \times \mathbb{R}. En pratique, l'ensemble supervisé
constitue généralement les n_l premiers individus
de l'ensemble total.
Dans le cas linéaire, la fonction f est paramétrée
par un modèle noté w \in \mathbb{R} ^ d, et
optionnellement par un biais b \in \mathbb{R}. Le
problème d'optimisation consiste donc à trouver la valeur
de w (et b) minimisant le coût. La
fonction f s'écrit alors :
x \mapsto \sum_{j = 1} ^ d x_j w_j + b
Dans le cas d'un apprentissage à noyau, on définit une fonction
qui agit sur une paire d'individus. La fonction f
dépend donc de l'ensemble
d'apprentissage \left(x_i\right)_{i = 1}^N, et elle
adopte la forme suivante :
x \mapsto \sum_{i = 1} ^ N \kappa (x_i, x) w_i + b
Notations matricielles
Pour la notation matricielle, on note X \in \mathbb{R} ^
{N, d} la matrice de données, de sorte que pour tout
individu d'apprentissage i \in \{1, ...,
N\}, X_{i, .} = x_i. De la même façon, on
introduit X_l \in \mathbb{R} ^ {n_l, d} et y
\in \mathbb{R} ^ n_l pour l'ensemble labellisé des
données. Dans certains cas, les opérations sur y
sont plus communément décrites en utilisant une notation
matricielle, c'est-à-dire en considérant la
matrice-colonne Y \in \mathbb{R}^{n_l, 1} telle que
pour tout 1 \leq i \leq n_l,
Y_{i, 1} = y_i. On peut reprendre cette notation
pour la valeur de la prédiction : pour un certain ensemble
d'apprentissage, comprenant n_t individus, on
obtient une matrice \hat Y \in \mathbb{R}^{n_t, 1}.
Approches de régression semi-supervisée
Nous allons présenter maintenant les approches les plus
importantes pour l'apprentissage semi-supervisé en général, et
plus particulièrement la régression semi-supervisée. En effet,
l'apprentissage semi-supervisé concentre principalement des
travaux de classification. Certains peuvent être directement
adaptés au cadre de la régression, même si d'autres utilisent
des normalisations ou des régularisations qui ne font sens que
pour un problème de classification. Enfin, certains sont
spécifiques à la régression.
Régression Laplacienne
Cette famille d'approches est très employée pour les problèmes
d'apprentissage semi-supervisé, et permet de traiter
indifféremment des problèmes de régression et des problèmes de
classification. De plus, la simplicité de l'idée qu'elle
développe lui procure une notoriété supplémentaire.
Champs gaussiens et fonctions harmoniques
L'idée développée par cette approche se résume en deux points
) :
La prédiction sur l'ensemble labellisé doit correspondre aux
valeurs de labels de l'apprentissage ;
Si deux individus sont proches (dans un sens à définir), alors
la prédiction pour ces deux individus doit être similaire.
Tout d'abord, il faut indiquer dans quel sens deux individus
sont proches. À partir de la matrice de données X,
on construit un graphe, où chaque individu correspond à un nœud,
et dans lequel deux individus sont reliés si la distance est
suffisamment faible (ou si la similitude est suffisamment
élevée). Dans la pratique, lorsque l'on trouve une approche qui
mobilise un graphe des individus, la similarité retenue est
presque toujours donnée au travers d'un noyau gaussien, aussi
appelé radial basis function (RBF,
,
,
,
, par exemple) : si
deux individus i et j ont pour
caractéristiques x_i et x_j, la
similarité M_{ij} \in \mathbb{R} s'exprime par :
Ce qui introduit un hyperparamètre à fixer a priori, 2
\sigma^2 > 0, qui est aussi parfois
noté \gamma, ou 4 t
(). La
matrice M ainsi créée est souvent
appelée W pour désigner les poids du graphe.
Dans les cas où les données sont en grande dimension, par
exemple pour la classification de textes
(), la RBF ne peut pas
s'appliquer directement, à cause de sa dépendance à la norme
l_2, qui peut difficilement distinguer des
distances entre individus en grande dimension. Par conséquent,
on peut la remplacer par la similarité cosinus :
Cette matrice M est généralement rendue
parcimonieuse (sparse), pour faciliter
les calculs quand le nombre d'individus est très élevé. En ce
sens, on affecte souvent à 0 la valeur de M_{ij}
si i et j sont trop éloignés,
c'est-à-dire si x_i n'est pas un des k
plus proches voisins de x_j et
réciproquement x_j n'est pas non plus l'un
des k plus proches voisins
de x_i. (par exemple,
ou
).
Dans tous les cas, on s'assure que la matrice M
soit symétrique.
Minimiser l'écart de prédiction entre deux individus proches
revient en fait à minimiser :
\sum_{i_1 = 1} ^ N \sum_{i_2 = 1} ^ N M_{i_1 i_2} \hat y_{i_1} ^
2 + \sum_{i_1 = 1} ^ N \sum_{i_2 = 1} ^ N M_{i_1 i_2} \hat
y_{i_2} ^ 2 - 2 \sum_{i_1 = 1} ^ N \sum_{i_2 = 1} ^ N M_{i_1
i_2} \hat y_{i_1} \hat y_{i_2}
En utilisant le fait que la matrice M est
symétrique, on peut le ramener à :
2 \sum_{i = 1} ^ N \sum_{j = 1} ^ N M_{ij} \hat y_{i} ^ 2 - 2
\sum_{i_1 = 1} ^ N \sum_{i_2 = 1} ^ N M_{i_1 i_2} \hat y_{i_1}
\hat y_{i_2}
qui se simplifie en :
2 \sum_{i = 1} ^ N \left (\sum_{j = 1} ^ N M_{ij}\right) \hat
y_i ^ 2 - 2 tr\left(\hat Y' M \hat Y\right)
Ceci fait apparaître la somme de chaque ligne de M,
que l'on écrit dans une matrice diagonale D (de
« degré », c'est-à-dire contenant sur la diagonale le degré de
chaque nœud du graphe) :
D = \mathrm{diag} (M \mathbf{1})
Le problème revient donc à minimiser :
tr\left(\hat Y' (D - M) \hat Y\right)
ce qui fait apparaître tout naturellement la matrice Laplacienne
du graphe, L = D - M. En rajoutant la contrainte
concernant la prédiction sur l'ensemble labellisé, on obtient le
problème :
\hat Y \in \mathbb{R}^{n, 1}tr \left(\hat Y' L \hat Y\right)
\forall 1 \leq i \leq n,\quad}{\hat Y_{i} = Y_i
Ce problème d'optimisation est convexe, à condition que la
matrice L soit semi-définie positive. Il est
généralement employé pour des problèmes de classification
multi-classes (), ce
qui demande une autre forme de normalisation pour la
matrice L, de façon à avoir des prédictions
positives et de somme 1. Pour des problèmes de régression, nous
utiliserons principalement la normalisation la plus simple
(L = D - M, ).
Ce problème fait partie de la famille de problèmes
transductifs. Un problème d'apprentissage
transductif permet d'obtenir une prédiction pour les individus
non labellisés de l'ensemble d'apprentissage, cependant il est
impossible de généraliser à de nouveaux cas.
Régularisation Laplacienne LapRLS
Le problème précédent d'apprentissage transductif peut se
traduire en problème d'apprentissage inductif
semi-supervisé. Résoudre un tel problème permet d'obtenir un
modèle qui peut être utilisé pour obtenir une prédiction à
partir de n'importe quel point de la distribution des données.
L'algorithme LapRLS ()
peut être interprété comme une extension de l'algorithme
précédent. Avec les notations suivantes :
X \in \mathbb{R}^{N, d} désigne la matrice de
données ;
X_l \in \mathbb{R}^{n, d} désigne le
sous-ensemble labellisé de cette matrice ;
W \in \mathbb{R}^{d, 1} désigne le modèle ;
la prédiction s'écrit tout simplement :
f \colon X \mapsto \hat Y = X W
Si l'on se concentre sur le problème de régression, on peut
réécrire l'équation en :
W \in \mathbb{R}^{d, 1}\mathrm{tr} \left((XW)' L (XW)\right)
\forall 1 \leq i \leq n}{(X_l W)_{i} = Y_i
Cette formulation n'est pas complète, car il n'est pas possible
de résoudre la contrainte. Cependant, on peut utiliser une
régression à la place, aux moindres carrés (Least
Squares) : en introduisant un régulariseur \beta >
0, le problème se transforme donc en :
W \in \mathbb{R}^{d, 1}
\left\|X_l W - Y\right\|_F^2 + \beta \mathrm{tr} \left((XW)' L
(XW)\right)
Dans les cas où il est question d'apprentissage avec des données
à haute dimension, c'est-à-dire où d > N, la
régression aux moindres carrés ne fonctionne pas
correctement. En effet, le modèle contient trop de paramètres,
qui ne peuvent pas être déterminés par l'algorithme. Pour
pallier ce problème, on introduit généralement un terme de
régularisation supplémentaire, dit régularisation Ridge ou
Tikhonov : en introduisant un hyperparamètre supplémentaire,
\alpha > 0, on obtient :
W \in \mathbb{R}^{d, 1}
\left\|X_l W - Y\right\|_F^2 + \alpha \left\|W\right\|_F^2 +
\beta \mathrm{tr} \left((XW)' L (XW)\right)
Ces deux formulations ( et
) sont la base de nombreux algorithmes
d'apprentissage semi-supervisé. Le problème
peut notamment être résolu avec une
solution analytique :
W = [(X_l' X_l + \alpha I + \beta X'LX]^{-1} X_l' Y
Cette résolution de système linéaire nécessite un temps de
calcul en \mathcal{O} (N ^ 2 d ^ 3), ce qui est
considérable. Pour les approches effectuant une descente de
gradient, le gradient se calcule en :
\nabla_W \mathcal {L} = 2 X_l' [X_l W - Y] + 2 \alpha W + 2
\beta X'LXW
Dans les cas où la dimension d est plus grande que
le nombre d'individus N, le théorème de
représentation () nous
permet d'introduire une fonction à noyau \kappa \colon
\mathbb{R}^d \times \mathbb{R} ^ d \to \mathbb{R} et de
ne considérer comme variables que les interactions entre un
individu et le jeu d'apprentissage. On applique donc la
fonction \kappa entre tous les individus de
l'ensemble d'apprentissage (à gauche et à droite), ce qui donne
une matrice K \in \mathbb{R}^{N, N}. La solution
fait intervenir une inversion de la matrice K, ce
qui n'est pas recommandable du fait de sa dimension (N
\times N). On voit rarement cette approche appliquée dans
les travaux récents, puisque selon l'hypothèse de
l'apprentissage semi-supervisé, on dispose d'un grand nombre
d'individus non labellisés.
Algorithme LapSVM
L'algorithme SVR est une adaptation de SVM pour la régression
. Le SVM a été lui-même
adapté au cadre semi-supervisé avec le SVM
transductif, d'une part, et avec une régression
Laplacienne d'autre part
(,
). Cependant, la
régularisation Laplacienne peut aussi s'utiliser avec les SVM en
régression ().
Dans ce cas, on utilise la fonction de
coût \epsilon-insensible, où \epsilon
est un hyperparamètre, en combinaison de la matrice Laplacienne
d'un graphe que l'on aura calculé de la même façon qu'à la
section précédente.
On peut donc définir le problème d'apprentissage du LapSVM en
introduisant une marge supérieure \xi et une marge
inférieure \xi^{*} pour chaque point labellisé, et
en pénalisant les modèles qui donnent une prédiction hors de ces
marges.
On constate que la modification du SVM pour la régression
apportée pour inclure cet algorithme dans le cadre
semi-supervisé revient exactement à ajouter un terme de
régularisation Laplacienne.
Par ailleurs, une modification, nommée LapESVR
(), introduit une nouvelle variable,
V, qui fait office d'embedding de
labels intermédiaires, d'où le nom de
l'algorithme. Concrètement, on introduit un nouvel
hyperparamètre \gamma, et on cherche à résoudre
simultanément les contraintes suivantes :
Les valeurs du label Y sont bien reconstruites
par V sur l'ensemble labellisé ;
Si deux individus sont proches, la valeur des lignes
de V doit aussi être proche ;
Le modèle permet de bien reconstruire V avec la
fonction de coût \epsilon-insensible.
Avec la matrice diagonale J qui fait office
d'indicatrice des individus labellisés :
hors de la diagonale, elle vaut 0 : \forall i \neq j,
J_{ij} = 0
sur la diagonale, elle indique les n premiers
individus : \forall i, J_{ii} = [i \leq n]
Méta-algorithmes de régression semi-supervisée
Parmi les approches d'apprentissage semi-supervisé, on trouve
aussi des méta-méthodes qui fonctionnent à partir d'un
apprentissage supervisé.
Self-training
Le self-training est un algorithme d'apprentissage
semi-supervisé relativement simple . Étant donné un régresseur de base, h \colon
\mathcal{X} \to \mathbb{R}, on obtient un modèle
semi-supervisé en itérant l'algorithme suivant :
Faire un apprentissage de h sur l'ensemble
labellisé (X_l, Y) ;
Obtenir une prédiction sur la partie non
supervisée : \hat Y \gets h (X) ;
Sélectionner les indices des prédictions pour lesquelles la
confiance est la plus grande, i. Si la confiance
est trop faible pour tous les points non labellisés, arrêter
l'algorithme ;
Transférer X_{i.}, \hat Y_{i.} depuis l'ensemble
non labellisé vers l'ensemble labellisé.
Cet algorithme n'est pas complètement spécifié, il reste à
définir comment l'étape est
implémentée. Pour certains classifieurs, comme la régression
logistique ou le SVM, il est
possible d'utiliser les scores d'appartenance à une classe.
Dans le cas d'un apprentissage pour la classification, on peut
également utiliser une méthode ensembliste pour remplacer
h. Dans ce cas, h est composé d'un
ensemble \left(h_i\right)_{i = 1} ^ c de
classifieurs, ce qui permet de définir pour un point de
l'ensemble non-labellisé x la prédiction comme
étant la classe majoritaire de l'ensemble \left\{h_i
(x)\right\}_{i = 1} ^ c. En ce qui concerne la confiance
dans la prédiction, on peut considérer l'entropie.
Dans le cas de la régression, on ne peut pas utiliser d'approche
fournissant directement un score de confiance. On peut cependant
utiliser des méthodes ensemblistes, similaires au cas de
classification . Dans ce cas, un ensemble de régresseurs est utilisé à la
place de h. Chaque régresseur donne une prédiction
pour chaque individu non labellisé. La prédiction
de h correspond à la moyenne des prédictions de
chacun des régresseurs, et la confiance est calculée à partir de
la variance des prédictions des régresseurs. Lorsque la variance
augmente, la confiance diminue.
Cette mesure de confiance est particulièrement intéressante
parce qu'il est possible d'utiliser n'importe quel régresseur
pour les \left(h_i\right)_i. Par conséquent, cette
méthode permet de construire un algorithme d'apprentissage
semi-supervisé ensembliste à partir d'un algorithme de
régression supervisée quelconque.
Les auteurs dans
définissent aussi une autre mesure de confiance, qui ne
s'applique que dans le cas d'une forêt aléatoire. Dans ce cas,
il est possible de suivre le parcours d'un individu à travers
chacun des arbres. Si deux individus aboutissent à la même
feuille pour un certain nombre d'arbres, on peut considérer
qu'ils sont voisins. Étant donné que chaque régresseur de
l'ensemble a été entraîné à partir d'un jeu d'apprentissage
différent, sélectionné par échantillonnage avec remise, pour
chaque régresseur, il existe des points de l'ensemble labellisé
qui n'ont en fait pas servi pour l'entraîner : ce sont les
exemples « hors du lot » d'apprentissage (Out of
bag). Pour évaluer la confiance d'un point de l'ensemble
d'apprentissage, on peut sélectionner les individus de
l'ensemble d'apprentissage proches, et pour chacun de ces
voisins labellisés, évaluer l'erreur de régression des
régresseurs qui n'ont pas utilisé ce point pour
l'entraînement. On obtient donc une estimation de l'erreur pour
chacun des points de l'ensemble d'apprentissage non labellisé,
qui est l'opposé de la confiance accordée à la prédiction pour
ce point.
Il est nécessaire de définir un critère d'arrêt pour
l'algorithme. En effet, si celui-ci se poursuit jusqu'à
épuisement du jeu d'apprentissage non-labellisé, il est possible
que la performance se dégrade. On choisit donc généralement un
seuil de confiance, en-dessous duquel on ne considèrera pas un
point de l'ensemble non labellisé. On peut également conserver
un ensemble de validation sur lequel évaluer chaque itération de
l'algorithme, et l'arrêter en cas de dégradation de
performance.
propose ansi de réutiliser les points out-of-bag
pour évaluer la performance de l'algorithme.
Le méta-algorithme self training peut être vu comme
étant transductif, puisque l'algorithme ne peut pas
généraliser la prédiction à un nouveau point. En effet, si un
point est ajouté dans l'ensemble non labellisé, l'ordre de
sélection peut changer à partir d'un certain point, et toutes
les prédictions et sélections suivantes seront modifiées.
En revanche, si le régresseur h (ou les
\left(h_i\right)_{i = 1} ^ c) sont inductifs, il
peut être utilisé tel quel pour effectuer une prédiction sur de
nouveaux individus. Ceci doit être considéré pour une
application d'un algorithme de self-training, mais
les études expérimentales n'ont pas besoin de s'y intéresser.
Le self-training est une méthode qui utilise les prédictions
d'un algorithme pour renforcer le jeu d'apprentissage de ce même
algorithme. En conséquence, il souffre d'un problème de biais de
confirmation , ce
qui peut dégrader significativement les performances dans des
cas similaires.
Co-training
Le co-training peut être vu comme une extension de l'algorithme de
self-training. Pour éviter de renforcer les erreurs
de l'algorithme à chaque itération, on introduit une certaine
forme de variabilité. Traditionnellement, l'ensemble des
variables est séparé en deux « vues » différentes. Par exemple,
une page web peut être décrite par le texte qui y figure, mais
aussi par les liens qui s'y trouvent. Chacune des vues est donc
un ensemble de variables. Les vues doivent être suffisantes pour
obtenir une classification des pages web, mais l'information ne
doit pas être répétée.
Une modification simple de l'algorithme de co-training peut
avoir lieu. Pour rappel, on dispose d'un classifieur de base
h. Les deux vues sont séparées en X_1
et X_2 ; se rapporter à la figure
.
Apprentissage semi-supervisé multi-vues pour
le co-training
Le principal consiste à :
Faire un apprentissage d'une première instance du classifieur,
h_1, de {X_l}_1 vers Y ;
Effectuer la prédiction pour l'ensemble non labellisé :
prédire \hat Y_1 à partir de X_1
avec le classifieur h_1, et \hat Y_2
à partir de X_2 avec le
classifieur h_2. Calculer également la confiance
dans la prédiction pour les deux algorithmes ;
Augmenter l'ensemble d'apprentissage du
classifieur h_2 avec les prédictions les plus
confiantes de h_1, et vice versa.
Visuellement, on peut se fier à la figure
à titre d'exemple
illustratif. En haut à gauche, le début d’une itération montre
que certains individus sont labellisés pour les
régresseurs h_1 et h_2 (en blanc), et
d’autres non (en gris). En haut à droite, chaque régresseur
effectue une prédiction, et on retient celles de confiance
maximale. En bas à gauche, les valeurs prédites sont
communiquées à l’autre régresseur. En bas à droite, les nouveaux
individus sont labellisés.
Apprentissage semi-supervisé avec le co-training
En ce qui concerne l'adaptation à la régression, on trouve
principalement l'algorithme COREG, qui, au lieu
d'utiliser plusieurs vues pour entraîner deux instances
différentes de l'algorithme, utilise deux algorithmes
différents. Il s'agit de régresseurs aux plus proches voisins,
avec deux indices de Minkowski différents : p = 1
et p = 2. C'est-à-dire que les deux régresseurs
produisent une moyenne des labels des k plus
proches voisins, le premier avec la distance l_1,
le second avec la distance l_2.
Pour évaluer la certitude de la prédiction d'un des régresseurs,
l'algorithme vérifie si l'erreur de régression locale diminue en
ajoutant le point. Pour ce faire, on sélectionne k
voisins du point considéré dans l'ensemble d'apprentissage
labellisé, et on apprend une nouvelle instance du régresseur
h_i, h_i', mais uniquement sur ce
voisinage agrémenté du point considéré. En comparant les résidus
de h_i et h_i' sur les voisins
labellisés, on peut savoir si ajouter le point augmentera ou pas
les performances locales de l'algorithme.
Il est à noter que cet algorithme fonctionne grâce au fait que
les régresseurs sont des k-NN (k plus
proches voisins). En effet, il faut effectuer un apprentissage à
chaque itération, et à chaque point non encore labellisé.
Sélection de variables pour l'apprentissage semi-supervisé
La sélection de variables consiste à étudier l'ensemble des
variables du jeu de données et à n'en retenir qu'un petit
nombre. Il y a plusieurs avantages à effectuer une sélection de
variables, surtout dans les applications à grande dimension (par
exemple, des applications textuelles) :
La dimension du problème est réduite, ce qui permet
d'appliquer d'autres algorithmes ;
Le modèle est plus interprétable, c'est-à-dire que la
connaissance extraite par l'apprentissage est compréhensible
par l'être humain.
En ce qui concerne l'apprentissage semi-supervisé, il existe
plusieurs méthodes de sélection de variables qui permettent de
tirer profit de la présence d'individus non labellisés dans le
jeu d'apprentissage.
L'évaluation de variable est une approche de sélection de
variables qui donne un score à chacune des variables. Pour en
effectuer la sélection, il suffit donc simplement de ne
conserver que les variables dont le score est le plus élevé.
Le cadre d'apprentissage semi-supervisé appelle bien souvent la
construction d'un graphe et son exploitation au travers de la
matrice Laplacienne. Pour l'évaluation des variables, on dispose
du score Laplacien. La construction du graphe
utilise encore une fois le même procédé : les k
plus proches voisins (symétriques) sont reliés dans un graphe,
et on affecte à l'arête entre ces voisins un poids calculé à
partir de la fonction RBF. Une fois la matrice
d'adjacence M obtenue, on calcule la matrice de
degré D comme étant la diagonale de la somme des
lignes (ou des colonnes) de M, et on utilise
toujours la normalisation L = D - M.
Notons X^j la colonne j de la matrice
X. Ainsi, X^j contient les données de
la jième variable.
Une première étape consiste à normaliser chaque variable afin
d'en retirer la moyenne une fois appliquée sur le graphe :
Cette méthode permet donc d'effectuer une sélection de variables
non supervisée.
L'utilisation du score Laplacien peut aussi être détourné pour
une sélection de variables semi-supervisée. Des travaux
(,
,
,
,
) se sont concentrés
sur les approches en classification ; cependant on peut aussi
l'utiliser pour des applications de régression. L'algorithme
SSLS se sert de la
définition du score Laplacien non-supervisé, ainsi que d'une
adaptation de ce score pour la régression supervisée, pour
fournir un score semi-supervisé.
Le score Laplacien supervisé pour la régression est très
similaire au score Laplacien non supervisé : on commence par
construire un graphe des individus, labellisés cette fois, mais
au lieu de considérer la distance entre individus selon leurs
variables, on considère la distance entre leurs labels. Ainsi,
on obtient une matrice M^{\mathrm{sup}} définie
pour une paire d'indices d'individus labellisés i, j \leq
n_l :
Ce graphe peut aussi être rendu éparse en ne
sélectionnant que les arêtes les plus fortes. Le score
semi-supervisé consiste donc à combiner ces deux formulations
pour obtenir le graphe suivant :
M^{\mathrm{semi}}_{i, j} =
\begin{cases}
\alpha M_{i, j} ^ {\mathrm{sup}}, & i, j \leq n \\
M_{i, j}, & i > n \vee j > n
\end{cases}
avec M le score Laplacien non supervisé vu plus
haut, et \alpha un nouvel hyperparamètre qui permet
de donner plus ou moins d'importance à l'utilisation des
individus labellisés par rapport aux individus non labellisés.
Régression multi-labels
L'apprentissage multi-tâches consiste à réutiliser un modèle ou
une partie d'un modèle afin de résoudre plusieurs tâches
d'apprentissage simultanément. C'est un cadre très utilisé dans
l'apprentissage à base de données textuelles, car les
différentes tâches d'apprentissage sont reliées. Dans
, l'apprentissage
multi-tâches s'effectue en réutilisant certaines couches du
modèle dans un réseau de neurones profond.
La régression multi-labels est un cas particulier de la
régression multi-tâches. Dans le cadre de la régression
multi-labels, toutes les tâches sont continues et à une
dimension. La prédiction pour un individu consiste en exactement
une valeur pour chacun des labels. Cette distinction peut être
comprise en comparant un jeu de données multi-tâches très
utilisé, schools, et un jeu de données
multi-labels, sarcos.
Le jeu de données schools est une agrégation des
résultats d'élèves différents dans des écoles différentes ; pour
chaque école, la variable cible est la note de l'élève, et les
variables consistent en des constantes par école et des
variables descriptives de l'élève. Tous les élèves sont décrits
dans le même espace de variables, on peut donc considérer le
problème comme multi-tâches. Cependant, chaque élève n'est
inscrit que dans une seule école, il est donc impossible de
considérer ce jeu de données comme multi-tâches.
En comparaison, sarcos est tiré d'un robot, dont on
a mesuré les positions, vitesses et accélérations des
articulations, et dont on cherche à prédire les moments aux
articulations. Cette fois-ci, il s'agit d'un jeu de données
multi-labels puisque chaque mesure donne une valeur pour tous
les labels.
L'apprentissage multi-labels a concerné historiquement des
problèmes de classification binaire, il faut donc faire
attention à ne pas le confondre avec la classification
multi-classes. Dans l'apprentissage multi-labels, on suppose que
les labels partagent de l'information. On peut notamment
s'intéresser à la corrélation entre labels.
Métriques de régression multi-labels
Il y a différentes façons d'évaluer un algorithme de régression
multi-labels. On cherche en effet à comparer les résultats de la
prédiction, \hat Y \in \mathbb{R}^{d, m}, avec les
vraies valeurs, Y \in \mathbb{R}^{d, m}.
On note :
la moyenne du label 1 \leq k \leq m : \bar
Y_k ;
la matrice moyenne, \bar Y \in \mathbb{R}^{n_t,
m}, définie par : \bar Y_{i, k} = \left[\bar
Y_k\right]_{i, k}.
Les métriques usuelles de régression mono-label peuvent être
réutilisées pour définir des métriques multi-labels. Pour
rappel, on trouve :
la RMSE, pour root-mean-squared
error, i.e. la racine de l'erreur quadratique moyenne ;
la MAE, pour mean absolute error,
i.e. erreur absolue moyenne ;
les métriques relatives : RRSE pour root of
relative squared error, i.e. racine de l'erreur
quadratique relative, et RAE pour root of
absolute error, i.e. racine de l'erreur absolue. Ces
métriques expriment le rapport entre la métrique associée à
la prédiction et la métrique associée à la prédiction
constante de la moyenne du label ;
le coefficient de corrélation CC entre \hat
Y_{.1} et Y_{.1}.
L'extension de ces métriques en multi-labels consiste à définir
une métrique moyenne ou macro, et une
métrique micro. La métrique moyenne, préfixée par
un « a » pour average, consiste à calculer la
métrique sur tous les labels et à en retenir la moyenne. La
métrique micro, préfixée par un « µ », consiste à mettre bout à
bout les labels pour appliquer la métrique mono-label.
En ce qui concerne la métrique MAE, il n'y a pas de
différence, puisqu'on peut intervertir l'ordre des
sommations. On ne conservera donc que la aMAE.
Parmi toutes ces métriques, la aRMSE est la plus
employée.
Chaînes de régresseurs pour l'apprentissage multi-labels
Nous allons commencer par étudier les approches algorithmiques
qui permettent de convertir un régresseur mono-label en
régresseur multi-labels
.
Stacking pour la régression multi-labels
Pour réutiliser l'information des labels, l'approche de
transformation la plus populaire est l'empilement de régresseurs
(stacking). Dans ce contexte, un régresseur est
entraîné pour chaque label. On obtient un nouvel espace de
description des individus, en combinant les variables du jeu
d'apprentissage et les valeurs des labels. Un deuxième ensemble
de régresseurs est entraîné, ce qui permet d'effectuer une
prédiction en deux temps tout en conservant de l'information
entre tous les labels.
Chaînes de régresseurs
Il est possible de développer cette approche. Pour construire
une chaîne de régresseurs, il faut sélectionner un ordre des
labels, puis pour chacun, entraîner un régresseur pour obtenir
une prédiction pour ce label à partir de l'ensemble des
variables ainsi que l'ensemble des prédictions pour les labels
précédemment sélectionnés. La prédiction se fait dans le même
ordre, en utilisant les prédictions précédentes. On obtient
l'algorithme RCC pour chaîne de régresseurs
corrigée (regressor chains corrected, la correction
venant du fait que chaque étape effectue une prédiction à partir
des prédictions et non des labels).
Chaînes de régresseurs ensemblistes
Cette méthode ne donne pas le même résultat selon l'ordre de
sélection des labels. C'est un problème, car la prédiction pour
le premier label ne peut pas s'appuyer sur la prédiction des
autres : il est de fait traité comme un problème mono-label. Ce
problème est résolu en prenant plusieurs ordres différents, et
en effectuant une prédiction ensembliste, où la valeur prédite
pour chaque label est la moyenne des valeurs prédites par chaque
ordre de sélection.
Approches portant sur la régularisation multi-labels
En ce qui concerne les approches de régression, l'optimisation
de méthodes de régularisation multi-labels pose un problème
supplémentaire par rapport à la régression mono-label. En effet,
si l'on veut appliquer une simple régularisation Ridge en
multi-labels, la solution est simple à calculer :
W = [X' X + \alpha I] ^ {-1} X' Y
Malheureusement, en ajoutant des régularisations relatives aux
labels, par exemple en remplaçant le terme Ridge
par \alpha \left\|WA\right\| avec A
une matrice quelconque, on obtient :
où I_m (I_d) est la matrice identité
de dimension m (d) et \_ \otimes
\_ désigne le produit de Kronecker. La dimension du
système à résoudre n'est donc plus d \times d, mais
bien d \times d \times m \times m, et on ne peut
plus se satisfaire de solution analytique au problème.
MALSAR (Multi task Learning via structural regularization)
MALSAR https://github.com/jiayuzhou/MALSAR
est une implémentation d'un ensemble de méthodes partageant
l'utilisation d'une fonction objectif régularisée pour traiter
le problème multi-labels. L'optimisation se fait toujours par
descente de gradient accélérée, ce qui résout le problème de
complexité soulevé plus haut.
Lasso par groupe
La régularisation du Lasso par groupe, group lasso, utilise l'hypothèse
suivante :
Parmi l'ensemble des variables du problème, seul un certain
nombre d'entre elles sont utiles pour la prédiction simultanée
de tous les labels.
Pour utiliser cette hypothèse, le Lasso
, ou
régularisation l_1, est un bon candidat. En effet,
si l'on considère le problème suivant :
w \in \mathbb{R}^{d}
\left\|Xw - y\right\|_2^2 + \alpha \left\|w\right\|_1
La solution, en fonction de la valeur de \alpha,
sera plus ou moins éparse, c'est-à-dire que le
modèle w aura un certain nombre de composantes
entièrement nulles. Plus précisément, l'optimisation de ce
problème par descente de gradient proximal nous indique que la
solution se situe à une distance l_1 de
\alpha^{-1} de l'origine. Si le problème a deux
dimensions, une grande valeur de \alpha laisse une
plus grande partie de l'espace menant à une solution où l'une
des coordonnées du modèle est nulle, cf figure
.
Comparaison de modèles pour Lasso : lorsque le régulariseur
\alpha est grand, les zones dans lesquelles le
modèle perd une composante sont plus étendues.
Pour l'apprentissage multi-labels, l'extension du lasso retenue
est le lasso par groupe
. En effet, on suppose
que tous les labels peuvent être prédits à partir d'un
sous-ensemble des variables. On souhaite donc appliquer une
régularisation équivalente, en n'appliquant la régularisation
que sur les lignes de W. On obtient
donc le problème :
W \in \mathbb{R}^{d, m}
\left\|XW - Y\right\|_F^2 + \alpha \sum_{j = 1} ^ d \left\|W_{j.}\right\|_2
La norme ainsi obtenue est notée \left\|W\right\|_{2,
1}.
Cette formulation utilise la norme l_{2,1}. Il est
possible d'utiliser d'autres normes pour obtenir un résultat
comparable. L'algorithme nommé Dirty Model utilise deux termes pour la
régularisation, afin de pouvoir traiter à la fois les cas où
l'on peut réutiliser les mêmes variables pour tous les labels,
et ceux où il faut un modèle différent par label. Le modèle
s'exprime de la façon suivante :
W = P + Q, P \in \mathbb{R} ^ {d, m}, Q \in \mathbb{R} ^ {d, m}
\left\|X (P + Q) - Y\right\|_F^2 + \alpha \left\|P\right\|_{1, 1} + \beta \left\|Q\right\|_{\infty, 1}
Pour plus de clarté, on utilise la notation
\left\|Q\right\|_{\infty, 1} et pas la notation
employée dans l'article original
.
En sélectionnant les hyperparamètres \alpha
et \beta, il est possible de traiter mieux plus de
cas que le problème . Le modèle se
décompose donc en deux termes, comme le montre la figure
.
Un régresseur produit par le dirty model
Régularisation Laplacienne multi-labels
La régularisation Laplacienne évoquée tout au long de ce
document peut également être utilisée pour une régularisation
multi-labels . En effet, si l'on
considère que chaque label correspond à un nœud d'un graphe, on
peut définir une arête entre deux labels comme la similarité
entre ces deux labels. Pour cela, si l'on considère deux labels
quelconques, on peut comparer pour chaque individu les valeurs
assignées à ces deux labels. On peut ensuite agréger le résultat
sur tous les individus. Concrètement, la construction du graphe
se fait en utilisant non pas X comme pour
l'utilisation semi-supervisée,
mais Y_l'. L'hypothèse que l'on souhaite mettre en
œuvre peut être résumée de la façon suivante :
Si deux labels sont similaires, les valeurs du modèle pour ces
deux labels doivent être similaires.
On peut donc utiliser la fonction objectif suivante :
W \in \mathbb{R}^{d, m}
\left\|X W - Y\right\|_F^2 + \alpha \mathrm{tr} (W L_m W')
Cette régularisation est utilisée dans l'algorithme GLOCAL
, qui part du principe que
les données peuvent être partitionnées en sous-ensembles dans
lesquels la corrélation entre labels est différente.
Régularisation sur le rang
L'hypothèse selon laquelle les labels partagent de l'information
peut aussi se traduire par une contrainte sur le rang (des
colonnes) du modèle W. En effet, si l'on considère
que le modèle W s'écrit comme un produit P
\times Q, avec deux matrices P \in \mathbb{R}^{d,
o} et Q \in \mathbb{R}^{o, m}, alors le
modèle est de rang au plus o, et on peut constater
que l'information contenue dans P est réutilisée
pour tous les labels.
Dans la pratique, cette idée se traduit par une régularisation
sur la norme trace de la matrice W.
où \left(\sigma_i (W)\right)_{i = 1} ^ m désigne
l'ensemble des valeurs propres de la
matrice W. Dans ce cas, le problème s'écrit :
W \in \mathbb{R}^{d, m}
\left\|XW - Y\right\|_F^2 + \alpha \left\|W\right\|_{*}
Classification des labels
L'approche CMTL pour clustered multi-task
learning propose de faire une classification des labels,
à partir de l'algorithme des k-moyennes. Selon
, si l'on a o
clusters de labels, en supposant que les clusters sont
\left(\mathcal{C}_{l}\right)_{l = 1}^o, dont chacun
est de taille n_l, et l'indicatrice des clusters se
note C \in \mathbb{R}^{k, m} telle que pour un
label k et un cluster o :
C_{k l} =
\begin{cases}
\frac 1 {\sqrt{n_l}}, & k \in \mathcal{C}_l \\
0, & k \notin \mathcal{C}_l
\end{cases}
En relaxant la définition de C pour avoir
simplement C' C = I, le problème
des k-moyennes devient :
C \in \mathbb{R}^{m, o}
\mathrm{tr} \left(W'W\right) - \mathrm{tr} \left(C'W'WC\right)
C'C = I
À partir de cette formulation, il est possible de construire une
fonction objectif multi-labels :
W \in \mathbb{R}^{d, m}, C \in \mathbb{R}^{m, o}
\left\|XW - Y\right\|_F^2 + \alpha \left(\mathrm{tr} \left(W'W\right) - \mathrm{tr} \left(C'W'WC\right)\right) + \beta \left\|W\right\|_F^2
C'C = I
La formulation n'étant pas convexe, elle n'est pas
satisfaisante. propose donc de
poser M = CC', \eta = \frac \beta
\alpha, pour obtenir la fonction objectif suivante :
W \in \mathbb{R}^{d, m}, M \in \mathbb{R}^{m, m}
\left\|XW - Y\right\|_F^2 + \alpha \eta \left(1 + \eta\right) \mathrm{tr} \left(W \left(\eta I + M \right)^{-1}W'\right)
M \succeq 0I - M \succeq 0\mathrm{tr} \left(M\right) = o
La notation M \succeq 0 signifie que M
est une matrice réelle symétrique semi-définie positive.
Régularisation non-convexe avec une norme plafonnée
Jusqu'à présent, toutes les fonctions objectifs que nous avons
décrites sont convexes, ou convexes selon chacune de leurs
variables. Cependant, on peut également envisager des
régularisations non convexes. On n'obtient en général pas de
garantie de convergence, mais les résultats expérimentaux sont
souvent suffisamment importants pour qu'il ne soit pas possible
d’ignorer ces approches.
La norme l_1 plafonnée
consiste simplement à
régulariser certaines lignes du
modèle W avec la norme l_1, mais pas
toutes. Les lignes ayant des valeurs importantes ne sont pas
régularisées. Ce n'est pas la même chose que la
norme l_{2, 1} vue précédemment : ici,
l'application de la norme pour une variable régularisée signifie
qu'il n'y aura que quelques labels utilisant cette variable.
Le problème s'écrit de la façon suivante :
W \in \mathbb{R}^{d, m}
\left\|XW - Y\right\|_F^2 + \alpha \sum_{j = 1} ^ d \mathrm{min} \left(\left\|W_{j.}\right\|_1, \beta\right)
Ce problème n'est pas convexe ; il peut cependant être relaxé
pour être résolu itérativement, en utilisant plusieurs étapes. À
chaque itération, on détermine les lignes pour lesquelles la
régularisation s'applique, en calculant la norme
l_1 du modèle à l'itération précédente. Puis on
résout le problème en appliquant la régularisation uniquement
sur ces lignes.
La relaxation converge vers la solution du problème non convexe,
sous certaines conditions .
En ce qui concerne la régularisation sur le rang, il est aussi
possible de traiter un problème de norme plafonnée
. Le problème s'écrit alors :
La notation \sigma_k (W) désigne
la kième valeur propre
de W. Si l'on suit le même processus de relaxation
que pour MSMTFL , la régularisation ne
doit s'appliquer que sur les plus petites valeurs propres. Si
l'on note s le nombre de valeurs propres
supérieures à \beta,
et \left\|W\right\|_{s^{-}} la somme des valeurs
propres de W, sauf les s premières,
chaque itération résout le problème suivant :
W \in \mathbb{R}^{d, m}
\left\|XW - Y\right\|_F^2 + \alpha \left\|W\right\|_{s^{-}}
Cette norme peut en fait se réécrire comme la norme trace, moins
un terme calculé à partir de la décomposition en valeurs propres
du modèle à l'itération précédente, en tronquant la
décomposition à s termes. C'est un problème
convexe, mais avec un terme non lisse (la norme trace), qui peut
être résolu de la même manière que la régularisation trace
seule.
Semi-Supervised Multi-Task Regression, avec contraintes
L'algorithme SSMTR est une approche non
linéaire, utilisant un noyau, permettant de traiter le problème
de régression semi-supervisée en multi-labels. Il s'agit d'une
extension de la régression multi-labels
semi-supervisée SMTR, présentée également
dans .
Dans SMTR, chaque label est traité séparément par
un apprentissage à noyau, mais les paramètres des noyaux pour
tous les labels sont issus de la même distribution. C'est une
façon de réutiliser de l'information entre labels. L'extension
au cadre semi-supervisé vise à définir pour chaque label un
graphe d'individus, en déduire la matrice Laplacienne et
l'utiliser en complément du noyau multi-labels.
Bien qu'une matrice Laplacienne soit calculée pour chaque label,
l'inférence du modèle évite de calculer un produit de
Kronecker. En revanche, cette extension correspond bien à la
régression Laplacienne mono-label classique : une fois le jeu de
données non labellisé utilisé pour apprendre le modèle, il est
éliminé et ne sert plus pour la
prédiction. propose
donc d'ajouter deux types de contraintes :
La prédiction pour un individu est supérieure à la prédiction
pour un autre individu (avec une marge) ;
Un écart de prédiction entre deux individus doit être
supérieur à un écart de prédiction entre deux autres
individus.
L'inférence devient plus délicate, mais donne de meilleurs
résultats pour les jeux de données évoqués
précédemment sarcos et schools.
Le problème de sélection de variables multi-labels
Dans un problème d'apprentissage multi-labels, la sélection de
variables a un sens légèrement plus précis : on doit trouver un
sous-ensemble des variables qui permet d'obtenir une bonne
prédiction pour tous les labels
simultanément. Ainsi, on peut difficilement généraliser les
approches de sélection de variables mono-label directement au
multi-labels. Par exemple, l'utilisation du score Laplacien
supervisé, utilisé dans SSLS permet de faire de la
sélection de variables, en s’appliquant sur un jeu de données à
plusieurs labels, mais ne correspond pas à notre problème de
sélection de variables multi-labels. En effet, la construction
du graphe supervisé met en relation les individus de l'ensemble
d'apprentissage dont la distance dans l'espace des labels est
faible. La sélection de variables consiste donc en une
sélection moyenne pour les différents labels, et
elle n'est pas conçue pour traiter tous les labels en même
temps.
De la même façon, une adaptation naïve du Lasso en multi-labels
ne permet pas de résoudre le problème de sélection de variables
multi-labels. En effet, si l'on cherche à résoudre le problème
suivant :
W \in \mathbb{R}^{d, m}
\left\|X W - Y\right\|_F^2 + \alpha \sum_{j = 1} ^ d \sum_{k = 1} ^ m \left|W_{jk}\right|
On obtiendra une matrice W sparse, mais ce n'est
pas suffisant : il se peut que chaque label demande un
sous-ensemble différent de variables. Il faut que tous les
labels partagent un même sous-ensemble de variables.
Utilisation du Lasso par groupe
Pour pallier ce problème, il faut utiliser une version un peu
moins naïve du Lasso. En construisant un modèle
linéaire W, les lignes correspondent aux
coefficients pour une variable et les colonnes correspondent aux
coefficients pour un label. Ainsi, si l'on veut pouvoir exprimer
tous les labels avec un petit nombre de variables, il faut que
la matrice W ait un petit nombre de lignes non
nulles. Il faut donc appliquer une régularisation de type Lasso
sur les lignes de W, c'est-à-dire un lasso par
groupe. On retrouve donc directement
l'algorithme JFS.
Régularisation l_{2,1 - 2} non convexe pour la
sélection de variables
Si l'on examine la norme l_{2,1} pour un modèle à 2
variables et 1 label, on obtient la figure
haut. On constate que la valeur de la
fonction de coût est plus faible si l'une des coordonnées du
modèle est nulle, et elle est globalement minimale si les deux
coordonnées sont nulles. C'est utile pour la sélection de
variables, puisque l'optimisation du problème pourra éliminer
l'une des deux variables. Cependant,
propose une amélioration pour la sélection de variables
multi-labels, en utilisant la différence entre la
norme l_{2, 1} et la norme l_2. Les
effets de cette régularisation sont très parlants pour un modèle
à 2 variables (figure bas) : le coût
est exactement nul dès que l'une des variables est éliminée.
Norme l_{2, 1} et l_{2, 1 - 2} d’un
modèle à 2 variables et 1 label.
Ce problème n'est pas convexe, cependant il est possible de
l'optimiser en relaxant la partie non convexe par le plan
tangent à chaque itération.
Multi-Labels Informed Feature Selection
Pour les problèmes de sélection de variables, il n'est pas
toujours pertinent d'obtenir de bons résultats en
régression. Ceci débloque une opportunité pour utiliser des
variables latentes. C'est l'approche développée par l'algorithme
MIFS, pour Multi-Labels Informed Feature
Selection. Elle se fonde sur
plusieurs hypothèses, qui sont intégrées dans une même fonction
objectif.
Tout d'abord, MIFS propose une abstraction des
labels. Concrètement, il faut sélectionner un nombre de labels
latents, 1 \leq o \leq m, et introduire une matrice
de pseudo-labels V \in \mathbb{R}^{n, o} ainsi
qu'une matrice B \in \mathbb{R}^{o, m} de sorte à
substituer VB à Y, et à proposer un
apprentissage de V :
W \in \mathbb{R}^{d, o}, V \in \mathbb{R}^{n, o}, B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2 + \alpha \left\|Y - VB\right\|_F^2
Ensuite, une régularisation Laplacienne introduit l'hypothèse
suivante : pour chaque pseudo-label, deux individus proches ont
des valeurs proches. Enfin, la régularisation sur les lignes de
la matrice W permet d'obtenir un modèle sparse par
ligne, ce qui permet de guider la sélection de variables.
W \in \mathbb{R}^{d, o}, V \in \mathbb{R}^{n, o}, B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2 + \alpha \left\|Y - VB\right\|_F^2 + \beta \mathrm{tr} \left(V'LV\right) + \gamma \left\|W\right\|_{2, 1}
La fonction objectif est convexe en chacune de ces variables ;
l'algorithme MIFS choisit une optimisation alternée pour
l'optimisation.
Conclusion
Dans ce chapitre, nous avons présenté des méthodes de l’état de
l’art pour résoudre des problèmes d’apprentissage
semi-supervisés, et pour la régression multi-labels. Nous nous
sommes également intéressés au problème de sélection de
variables.
Régression Laplacienne semi-supervisée
Dans ce chapitre, nous présentons notre première contribution
sur la régression semi-supervisée utilisant une version
régularisée de l'algorithme SSSL. Nous commençons par décrire
les travaux liés, puis nous décrivons l'approche proposée,
après quoi nous montrerons à travers deux études
expérimentales l'apport de notre proposition.
L'algorithme SSSL de base consiste en deux étapes
distinctes : un changement d'espace non supervisé, puis une
régression simple dans ce nouvel espace. Nous proposons
d'emprunter la même idée du changement d'espace original, mais
en adoptant une régularisation Laplacienne dans le nouvel
espace ainsi obtenu.
Introduction
À cause de la prolifération des données partiellement
labellisées, l'apprentissage automatique a connu des
développements majeurs dans le contexte semi-supervisé
. Cette tendance
est due d'une part à la difficulté de la tâche de labellisation,
et d'autre part au coût associé lorsque la labellisation est
possible. L'apprentissage semi-supervisé est un cas particulier
de l'apprentissage faiblement labellisé
, qui consiste en général en
l'apprentissage d'une fonction objectif à partir de données
contenant à la fois des individus labellisés et des individus
non-labellisés. Ces situations peuvent être abordées par deux
classes d'approches : l'une fondée sur la propagation des
labels, dans le but d'utiliser des méthodes supervisées
, et l'autre fondée
sur la transformation des données labellisées en contraintes à
intégrer dans un processus non-supervisé de clustering
. Nous nous concentrons
sur la première classe d'approches, avec un défi particulier :
il s'agit d'apprendre à partir d'un petit sous-ensemble
supervisé, en comparaison de l'ensemble non supervisé. Dans ce
contexte semi-supervisé, la littérature a connu une extension
significative depuis les vingt dernières années, en particulier
pour la classification, grâce à des approches populaires comme
le self-training ,
le co-training , le SVM
transductif ou S3VM
, les
approches fondées sur des graphes
et des approches génératives
. Dans ce paradigme particulier,
les problèmes de régression ont aussi suscité l'intérêt de
plusieurs travaux de recherche que nous pouvons citer de façon
non exhaustive. Les approches sont diverses : fondées sur la
régression linéaire
,
logistique , ou
Laplacienne
;
d'autres approches sont fondées sur le co-training
; ou fonctionnent
avec des contraintes spécifiques liées à l'ordre de préférence
des données non labellisées
ou leur distribution
géométrique dans des espaces de haute dimension
.
Travaux liés
L'algorithme SSSL (Simple algorithm for Semi-Supervised
Learning) se décompose
en deux étapes simples :
Extraction de variables non supervisée au moyen d'une ACP à
noyau (k-PCA, kernel PCA) ;
Apprentissage supervisé dans ce nouvel espace.
Sous certaines hypothèses vis-à-vis des données, il est possible
de garantir que dans la classe de fonctions recherchée,
l'algorithme fournit une fonction ayant une erreur de régression
minimale (à une constante près), cette erreur de généralisation
théorique restant inférieure à ce que l'on obtiendrait sans les
individus non labellisés. Ces hypothèses portent sur :
l'erreur de régression minimale sur la classe de recherche des
fonctions ;
la distribution des valeurs propres de la matrice de noyau ;
les vecteurs propres de cette matrice ;
le nombre d'individus non labellisés.
L'algorithme SSSL permet de rechercher une fonction
de prédiction qui puisse s'écrire de la manière
suivante. Si N désigne le nombre d'individus y
compris les non labellisés de l'ensemble d'apprentissage,
et x_i \in \mathcal{X} désigne le
iième individu de l'ensemble
d'apprentissage, on définit une fonction de noyau \kappa
\colon \mathcal{X} \times \mathcal{X} \to \mathbb{R}. On
peut également définir la fonction \hat L_N
suivante :
\hat L_N \colon
\begin{array}{ccc}
\left(\mathcal{X} \to \mathbb{R}\right) &\to& \left(\mathcal{X} \to \mathbb{R}\right) \\
f &\mapsto& x \mapsto \frac 1 N \sum_{i = 1} ^ N \kappa (x_i, x) f (x_i)
\end{array}
On note les valeurs propres de cet opérateur linéaire
\left(\hat \lambda\right)_{k = 1} ^ {N} et ses
fonctions propres \left(\phi\right)_{k = 1} ^ N. La
fonction de prédiction est recherchée comme une combinaison
linéaire des s \leq N fonctions propres ayant la
plus grande valeur propre :
f \colon x \mapsto \sum_{k = 1} ^ s \Gamma_{k} \hat \phi_{k} (x)
Les coefficients \Gamma peuvent être obtenus tout
simplement par une régression aux moindres carrés, c'est-à-dire
en minimisant l'erreur de régression (z désigne le
vecteur de labels pour les individus labellisés) :
Par conséquent, les valeurs propres elles-mêmes de \hat
L_N ne sont pas utilisées.
La régularisation Laplacienne que nous utilisons
ne considère pas les
labels des données, ce qui permet d'utiliser tous les individus,
y compris ceux de l'ensemble non-supervisé. À partir de leurs
similarités dans l'espace des variables, un graphe est
construit. Les nœuds sont les individus, et les arêtes indiquent
des individus similaires. La régularisation consiste à indiquer
que les individus similaires doivent avoir des valeurs de la
variable cible similaires, en minimisant le terme suivant :
\sum_{i, j\mathrm{~similaires}} (f (x_i) - f (x_j)) ^ 2
Approche proposée : LapS3L
Bien que le changement d'espace introduit
par SSSL(présenté ci-dessus) permette de mieux
traiter certains problèmes de régression semi-supervisée
, elle n'utilise pas les mêmes
hypothèses que la régularisation Laplacienne. Dans le cas
général, il n'est pas possible de conclure à la proximité de
deux individus dans l'espace extrait à partir de deux individus
proches dans l'espace réel. Nous proposons donc de réguler
l'apprentissage en introduisant l'hypothèse suivante :
Si deux individus sont proches dans l'espace réel, alors l'écart
de prédiction doit être faible.
Nous proposons une nouvelle approche, fondée sur cette
hypothèse, que nous appelons LapS3L, pour
Laplacian-regularized Simple algorithm for Semi-Supervised
Learning. Nous décrivons dans ce qui suit, ses
différentes étapes.
Changement d'espace
En reprenant le cadre de l'algorithme SSSL, il est
possible de tisser un parallèle entre la décomposition en
valeurs et fonctions propres de \hat L_N et la
décomposition en valeurs propres et vecteurs propres de la
matrice noyau. Ce parallèle permet d'obtenir un algorithme
d'apprentissage en deux temps : obtention des vecteurs propres
de la matrice noyau, puis obtention de ses coefficients.
Tout d'abord, cette matrice notée K \in S_N^{+}
(\mathbb{R}) est définie comme l'application symétrique
de la fonction \kappa entre chaque individu de
l'ensemble d'apprentissage :
L'analyse des vecteurs propres de K permet
d'obtenir une matrice de vecteurs propres U \in
\mathbb{R}^{N, s}, dont les colonnes sont unitaires. On
peut donc poser le changement de variables suivant :
X \gets K' U
Dans ce changement de variables, chaque ligne de la
matrice X correspond à un individu de l'ensemble
d'apprentissage. Chaque colonne correspond à une variable
extraite. Le nombre de variables extraites est compris entre 1
et N. Par conséquent, dans le cas où la matrice de
données est plus longue que large, on peut avoir s >
d. Pour les applications où les données sont en grande
dimension, comme par exemple pour les données textuelles,
d'images ou génétiques, ce n'est pas un problème. Dans les
autres cas, la réduction de dimensionnalité ne peut s'opérer que
si la valeur de l'hyperparamètre s est relativement
faible.
Puisque les lignes de X sont aussi les lignes de la
matrice de données dans l’espace
original, \mathcal{V}, il est possible de ne
conserver que les lignes correspondant aux individus
labellisés. On obtient ainsi une sous-matrice X_l \in
\mathbb{R}^{n, s}.
Régression régularisée
Dans la deuxième partie de l'algorithme, l'implémentation
consiste à effectuer une régression simple à partir de ces
nouvelles variables. On obtient donc une liste de
coefficients, w, de dimension s.
w \in \mathbb{R}^s\left\|{X_l}w - z\right\|_2^2
Dans le cas où la fonction \kappa est en fait le
produit scalaire, la formulation de la régression dans le nouvel
ensemble de variables X, ,
montre qu'il n'y a pas de solution dans le cas où s >
d. L'extraction de variables permet donc dans ce cas une
réduction de dimensionnalité. Dans le cas général, cette
remarque ne tient pas. Par exemple, pour n'importe quel
hyperparamètre \sigma du noyau RBF :
La matrice noyau obtenue K est à diagonale
strictement dominante, donc inversible ; par conséquent la
matrice de covariance X'X l'est aussi en
extrayant N valeurs propres. Dans la pratique, les
approximations numériques ne permettent pas de choisir une
grande valeur de s.
Étant donné que la prédiction s'effectue directement dans
l'espace extrait, il suffit donc de construire le graphe des
individus à partir des variables d'origine, et d'ajouter un
terme de régularisation dans la fonction objectif linéaire de la
seconde étape. Concrètement, on remplace la régression
par la version utilisant la
régularisation Laplacienne :
w \in \mathbb{R} ^ s\left\|X_l w - z_l\right\|_2^2 + \alpha \left\|w\right\|^2 + \beta [Xw]'L[Xw]
Cette approche ne nécessite pas de changer la prédiction ; elle
n'intervient que dans l'apprentissage.
Prédiction
Pour la prédiction sur un ensemble de
test \mathcal{V}_t à n_t individus, on
commence par appliquer la matrice \kappa entre tous
les individus de l'ensemble labellisé, à gauche, et tous les
individus de l'ensemble de test, à droite. On note le
résultat K_b \in \mathbb{R}^{N, n_t} :
Le changement de variables est identique à celui effectué pour
l'apprentissage :
X_t \gets K_b' U \in \mathbb{R}^{n_t, s}
La prédiction est donc opérée par :
X_t w
Algorithme
L'algorithme montre les
étapes de l'apprentissage, et l'algorithme
décrit la fonction de
prédiction.
Le problème de minimisation de la fonction objectif,
, admet une solution analytique
:
La partie déterminante de la complexité de l’algorithme réside
dans la décomposition en valeurs propres et vecteurs propres de
la matrice de noyau, de dimension N \times N. Comme
nous ne nous intéressons qu’aux valeurs propres les plus grandes
en valeur absolue de cette matrice symétrique réelle, nous
pouvons appliquer un algorithme itératif
.
W \gets \left[X_l' X_l + \alpha I + \beta X' L X\right]^{-1}X_l' Y
\mathcal{V} \in \mathbb{R}^{N, d}z \in \mathbb{R}^{n_l}s \in \{1, ..., N\}\kappa \colon \mathcal{X} \times \mathcal{X} \to \mathbb{R}matrice Laplacienne du graphe des individus, L \in \mathbb{R}^{N, N}\alpha > 0\beta > 0
Construire la matrice K \in \mathbb{R}^{N,
N} : \forall i, j, \quad K_{i, j} =
\kappa (\mathcal{V}_{i, .}, \mathcal{V}_{j,
.})
Décomposer la matrice K en valeurs propres et
vecteurs propres, sélectionner les s vecteurs
propres ayant la plus grande valeur propre
associée : U \in \mathbb{R}^{N, s}
Poser X := K U
Sélectionner la sous-matrice Xl \in
\mathbb{R}^{n,s} composée des lignes
de X correspondant aux individus labellisés
w \in \mathbb{R} ^ s\left\|X_l w - z_l\right\|_2^2 + \alpha \left\|w\right\|^2 + \beta [Xw]'L[Xw]U \in \mathbb{R}^{N, s}w \in \mathbb{R}^{s}
Algorithme LapS3L : apprentissage
\mathcal{V} \in \mathbb{R}^{N, d}, \mathcal{V}_t \in \mathbb{R}^{n_t, d}\kappa \colon \mathcal{X} \times \mathcal{X} \to \mathbb{R}U \in \mathbb{R}^{N, s}w \in \mathbb{R}^{s}
Construire la matrice K_b \in \mathbb{R}^{N,
n_t} :
\forall i, j, \quad {K_b}_{i, j} = \kappa (\mathcal{V}_{i, .}, {\mathcal{V}_t}_{j, .})
Poser X_t := K_b' U\hat z \gets X_t w
Algorithme LapS3L : prédiction
Validation expérimentale
Dans cette section, nous présentons une première étude
expérimentale pour valider l'approche proposée sur des données
publiques issues de la littérature.
Jeux de données utilisés
Les auteurs dans ont identifié
trois jeux de données pour lesquels les hypothèses de
fonctionnement sont
établies : wine, insurance et
temperature.
wine regroupe une évaluation de la composition
chimique de 4898 vins, exprimée sur 11 variables continues,
ainsi qu'un score de qualité attribué à chaque vin
https://archive.ics.uci.edu/ml/datasets/wine+quality. La
cible, la qualité, est une valeur continue, ce qui en fait un
jeu de données de régression. La qualité ne suit pas une loi
uniforme : 45% des vins ont une qualité égale à 6, 30% ont une
qualité égale à 5, et 18% une qualité égale à 7. Ainsi, les
valeurs d'erreur de régression doivent être inférieures à la
base suivante : en prédisant toujours 6, on obtient
une RSME de 0.89 et une MAE de 0.63.
insurance, aussi appelé COIL2000
https://archive.ics.uci.edu/ml/datasets/Insurance+Company+Benchmark+(COIL+2000)
, regroupe des profils de personnes ayant souscrit une
assurance, établis sur 85 variables, et la cible est la
variable binaire indiquant si la personne assurée a une
assurance pour une caravane. Là encore, la cible est
déséquilibrée, puisque seuls 6% des clients ont une assurance
pour une caravane. La base consistant à prédire la valeur
moyenne donne une RMSE de 0.237, et prédire 0
donne une RMSE de 0.244 et une MAE
de 0.06.
temperature décrit la température de la haute
atmosphère, dans un jeu de données qui n'est pas public. Par
conséquent, nous ne l'utilisons pas dans notre étude.
Comme dans l’article original, nous conservons de 2% à 9% des
labels des jeux de données.
Protocole expérimental
L'algorithme LapS3L a plusieurs hyperparamètres :
la définition du noyau, et éventuellement la valeur de la
bande passante si c'est un noyau gaussien ;
le nombre de composantes principales ;
le régulariseur ridge \alpha ;
le régulariseur Laplacien \beta ;
la définition du graphe des individus.
Les valeurs de ces hyperparamètres sont recherchées dans les
ensembles suivants :
noyau : l'ensemble composé du noyau utilisant la similarité
cosinus, du noyau constitué par la matrice de Gram, et du
noyau gaussien dont la bande passante \sigma
prend les valeurs dans \{0.01, 0.05, 0.1, 0.5, 1, 5, 10,
50, 100\} ;
le nombre de composantes principales est sélectionné dans
l'ensemble entre {1, 2, 5, 10, 20, 50, 100, 200}. Une valeur
supérieure à 200 nuit à l'apprentissage du SSSL,
puisque la matrice de variables extraites X a un
rang trop faible, d'une part, et le temps d'apprentissage est
trop long, d'autre part ;
le graphe des individus est défini comme suit : on commence
par le construire complet, les arêtes étant valuées par la
similarité cosinus entre individus dans l'ensemble des
variables original, puis il est élagué de façon à ne conserver
que les 10 plus proches voisins symétriques ;
les deux régulariseurs sont choisis dans
l'ensemble \{\left(10^{k}\right)_{k = -4} ^ 4\}.
La procédure de tuning est la suivante :
Répéter 10 fois les opérations suivantes :
Sélectionner 90% du jeu de données labellisé pour
l'apprentissage, 10% pour le test (les données non
labellisées sont utilisées pour l'apprentissage) ;
Répéter 10 fois (insurance) ou 20 fois (wine) :
Tirer avec remise une valeur pour chaque
hyperparamètre,
Évaluer la performance (RMSE)
de LapS3L et SSSL en
validation croisée à 10 folds sur l'ensemble
d'apprentissage labellisé, en y ajoutant les individus
non labellisés ;
Sélectionner la meilleure valeur des hyperparamètres ;
Entraîner SSSL et LapS3L sur
l'ensemble d'apprentissage en utilisant ces
hyperparamètres ;
Tester sur l'ensemble de
test : RMSE, MAE,
RRSE, RAE.
Retourner la moyenne et l'écart-type de chacune de ces
métriques.
Le nombre de points du paramétrage est plus restreint pour le
jeu de données insurance, car il comporte environ
deux fois plus d'individus que wine.
Nous utilisons les quatre métriques suivantes pour évaluer la
régression semi-supervisée, où z désigne le label
de l'ensemble de test, \hat z la prédiction, et
\bar z la valeur moyenne sur l'ensemble
d'apprentissage :
RMSE ou Root Mean Squared Error,
racine de l'erreur quadratique
moyenne : \mathrm{RMSE} = \sqrt{\frac 1 {n_t}
\left\|z - \hat z\right\|_2^2}
MAE ou Mean Absolute Error, erreur
absolue moyenne : \mathrm{MAE} = \frac 1 {n_t}
\left|z - \hat z\right|
RAE ou Relative Absolute Error,
erreur en valeur absolue relative, \mathrm{RAE}
= \frac {\left|z - \hat z\right|_2^2} {\left|z - \bar
z\right|_2^2}
Résultats
Les résultats de la comparaison sont visibles dans les tables
-.
Comparaison entre LapS3L et SSSL
sur wine et insurance, métrique
RMSE.
dataset
LapS3L
SSSL
insurance (2%)
0.20 ± 0.03
0.21 ± 0.03
insurance (3%)
0.21 ± 0.02
0.21 ± 0.02
insurance (4%)
0.21 ± 0.02
0.22 ± 0.02
insurance (5%)
0.22 ± 0.02
0.22 ± 0.02
insurance (6%)
0.22 ± 0.02
0.22 ± 0.02
insurance (7%)
0.22 ± 0.02
0.22 ± 0.02
insurance (8%)
0.22 ± 0.02
0.23 ± 0.02
insurance (9%)
0.23 ± 0.01
0.23 ± 0.02
wine (2%)
0.77 ± 0.06
0.82 ± 0.06
wine (3%)
0.75 ± 0.05
0.80 ± 0.05
wine (4%)
0.77 ± 0.06
0.82 ± 0.05
wine (5%)
0.78 ± 0.05
0.84 ± 0.06
wine (6%)
0.78 ± 0.03
0.84 ± 0.04
wine (7%)
0.77 ± 0.04
0.84 ± 0.03
wine (8%)
0.77 ± 0.04
0.84 ± 0.04
wine (9%)
0.77 ± 0.04
0.84 ± 0.04
Comparaison entre LapS3L et SSSL
sur wine et insurance, métrique
MAE.
dataset
LapS3L
SSSL
insurance (2%)
0.07 ± 0.02
0.12 ± 0.02
insurance (3%)
0.07 ± 0.03
0.11 ± 0.01
insurance (4%)
0.09 ± 0.03
0.11 ± 0.02
insurance (5%)
0.09 ± 0.03
0.11 ± 0.02
insurance (6%)
0.09 ± 0.03
0.11 ± 0.02
insurance (7%)
0.10 ± 0.02
0.11 ± 0.02
insurance (8%)
0.10 ± 0.03
0.11 ± 0.02
insurance (9%)
0.11 ± 0.01
0.11 ± 0.01
wine (2%)
0.62 ± 0.05
0.67 ± 0.05
wine (3%)
0.60 ± 0.04
0.65 ± 0.05
wine (4%)
0.60 ± 0.05
0.66 ± 0.04
wine (5%)
0.61 ± 0.04
0.67 ± 0.04
wine (6%)
0.61 ± 0.03
0.68 ± 0.03
wine (7%)
0.61 ± 0.03
0.67 ± 0.03
wine (8%)
0.61 ± 0.03
0.67 ± 0.04
wine (9%)
0.61 ± 0.03
0.67 ± 0.04
Comparaison entre LapS3L et SSSL
sur wine et insurance, métrique
RRSE.
dataset
LapS3L
SSSL
insurance (2%)
0.71 ± 0.13
1.04 ± 0.04
insurance (3%)
0.86 ± 0.10
1.03 ± 0.03
insurance (4%)
0.91 ± 0.11
1.02 ± 0.03
insurance (5%)
0.95 ± 0.07
1.01 ± 0.01
insurance (6%)
0.96 ± 0.05
1.00 ± 0.01
insurance (7%)
0.99 ± 0.03
1.00 ± 0.01
insurance (8%)
0.97 ± 0.03
1.00 ± 0.01
insurance (9%)
0.99 ± 0.01
1.00 ± 0.00
wine (2%)
0.92 ± 0.05
0.97 ± 0.03
wine (3%)
0.90 ± 0.05
0.96 ± 0.04
wine (4%)
0.90 ± 0.03
0.96 ± 0.02
wine (5%)
0.90 ± 0.03
0.96 ± 0.02
wine (6%)
0.89 ± 0.02
0.96 ± 0.01
wine (7%)
0.89 ± 0.02
0.96 ± 0.02
wine (8%)
0.88 ± 0.02
0.96 ± 0.02
wine (9%)
0.88 ± 0.02
0.96 ± 0.01
Comparaison entre LapS3L et SSSL
sur wine et insurance, métrique
RAE.
dataset
LapS3L
SSSL
insurance (2%)
0.47 ± 0.17
1.02 ± 0.02
insurance (3%)
0.61 ± 0.25
1.01 ± 0.02
insurance (4%)
0.76 ± 0.28
1.01 ± 0.02
insurance (5%)
0.82 ± 0.25
1.00 ± 0.02
insurance (6%)
0.80 ± 0.25
1.00 ± 0.01
insurance (7%)
0.93 ± 0.15
1.00 ± 0.01
insurance (8%)
0.89 ± 0.20
0.99 ± 0.01
insurance (9%)
0.99 ± 0.01
1.00 ± 0.02
wine (2%)
0.95 ± 0.07
1.01 ± 0.03
wine (3%)
0.92 ± 0.07
0.99 ± 0.03
wine (4%)
0.91 ± 0.06
1.00 ± 0.03
wine (5%)
0.92 ± 0.05
1.00 ± 0.03
wine (6%)
0.92 ± 0.04
1.01 ± 0.02
wine (7%)
0.91 ± 0.03
1.00 ± 0.03
wine (8%)
0.91 ± 0.04
1.00 ± 0.03
wine (9%)
0.91 ± 0.03
1.00 ± 0.03
Pour la métrique RMSE (table
), LapS3L
et SSSL obtiennent une erreur de régression
inférieure à 0.244 (pour insurance) et 0.89 (pour wine), qui
étaient les lignes de base à dépasser. La métrique RMSE a été
utilisée pour la recherche des hyperparamètres (ci-après
dénotée tuning), ce qui n'est pas le cas pour la
métrique MAE, dont la ligne de base n'est pas toujours
respectée.
Plus précisément, la table
montre que LapS3L reste inférieur à la ligne de
base pour wine (0.63), mais pas pour insurance
(0.06). SSSL ne respecte aucune de ces lignes de
base.
Sur les deux jeux de données, quel que soit le nombre
d'individus labellisés (entre 2% et 9% du total) et quelle que
soit la métrique envisagée, l'approche LapS3L donne
un meilleur résultat que l'approche SSSL. Ce n'est
pas surprenant, puisque LapS3L est une
généralisation de SSSL. Cela signifie en revanche
qu'un tuning à 10 points (respectivement 20) pour insurance
(respectivement wine) est suffisant pour explorer un espace de
recherche de la solution plus grand. Pour les métriques
relatives, l'écart-type est plus faible pour SSSL,
mais ce n'est pas très pertinent : en effet, pour les métriques
relatives, les deux approches tendent à donner un résultat
proche de 1. Par conséquent, LapS3L donnant parfois
une erreur de régression bien plus faible, obtient un écart-type
plus grand.
En regardant de plus près le jeu de
données insurance, on s'aperçoit que les
performances sont bonnes pour un petit nombre de données
labellisées (cf figure ). En
effet, les limites imposées pour le tuning ne permettent pas de
contrer le sur-apprentissage.
Performance de LapS3L et SSSL
sur insurance (métrique RMSE)
La métrique MAE, toujours sur le jeu de
données insurance
(figure ), montre une tendance
similaire pour LapS3L, mais pas
pour SSSL, ce qui justifie la pertinence de notre
approche.
Performance de LapS3L et SSSL
sur insurance (métrique MAE)
Nous pouvons donc conclure que l'approche proposée, en tant que
généralisation stricte de SSSL, ne nécessite pas un
tuning plus précis pour donner de meilleures performances. Il
nous reste à vérifier si notre approche fonctionne hors des
hypothèses de fonctionnement de SSSL.
Étude comparative
Dans cette section, nous élargissons la comparaison des
performance à différents algorithmes sur d'autres jeux de
données publics divers.
Jeux de données
Nous utilisons les jeux de données publics suivants :
Concrete Compressive Strength
(concrete)
https://archive.ics.uci.edu/ml/datasets/Concrete+Compressive+Strength
observe des échantillons de béton comparant leur composition
et leur âge, afin d'en déduire la pression de compression. Ce
jeu de données comprend 1030 échantillons pour 9
variables. Afin de pouvoir appliquer la fonction de noyau,
toutes les variables du jeu de données sont normalisées de
manière à avoir une moyenne nulle et un écart-type égal à 1 ;
Airfoil Self-Noise
(airfoil)
https://archive.ics.uci.edu/ml/datasets/Airfoil+Self-Noise
observe des hélices, afin d'en déduire le niveau de bruit. Il
comprend 1503 observations pour 5 variables. Pour ce jeu de
données, toutes les variables ont été redimensionnées de
manière à obtenir une moyenne nulle et un écart-type égal à
1 ;
Communities and Crime Data Set
(crimepredict)
https://archive.ics.uci.edu/ml/datasets/Communities+and+Crime
mesure le nombre de crimes violents dans un certain nombre de
communes aux États-Unis. Il comprend 1994 individus pour 123
variables (en enlevant les variables d'index) décrivant les
communes, y compris leur démographie. Ce jeu de données a été
sélectionné parce qu'il contenait un nombre d'individus
suffisamment faible pour l'apprentissage, avec des variables
normalisées (ce qui permet d'appliquer directement une
fonction de noyau).
Algorithmes
Dans la version non linéaire de
l'algorithme LapRLS,
il s'agit de minimiser la fonction objectif suivante :
f \in \mathcal{H}_{\kappa}
\left\|\hat {f_l} - {y_l}\right\|_2^2 + \alpha \left\|f\right\|_{\kappa}^2 + \beta \hat {f}' L \hat f
Ici, \mathcal{H}_{\kappa} désigne un espace de
Hilbert à noyau reproduisant. Dans cet espace, une
fonction f s'écrit de la façon suivante :
x \mapsto \sum_{i = 1}^N \alpha_i \kappa (x_i, x)
On note également \hat f l'application de la
fonction f sur le jeu d'apprentissage (\hat
{f_l} uniquement sur les individus labellisés). La
fonction objectif peut être résolue de manière analytique en
posant :
\alpha \gets \left[JK + \alpha I + \beta LK\right]^{-1} J Y
avec J la matrice diagonale de
dimension N,N dont la diagonale en (i,
i) vaut 1 si l'individu i est
labellisé, 0 sinon.
En plus de la version non linéaire de LapRLS, ainsi
que de SSSL, nous comparons avec une forêt
aléatoire (TB pour Tree Bagging) comprenant entre 1 et 1000
arbres, et l'algorithme ν-SVR.
La comparaison de ces algorithmes sur les 4 jeux de données
donnent les résultats dans la table
.
Comparaison de LapS3L contre d’autres
algorithmes de régression, métrique RMSE
dataset
LapS3L
LapRLS
SSSL
ν-SVR
TB
airfoil (2%)
0.65 ± 0.09
0.73 ± 0.11
0.70 ± 0.13
0.78 ± 0.09
0.74 ± 0.07
airfoil (3%)
0.67 ± 0.08
0.69 ± 0.11
0.75 ± 0.10
0.80 ± 0.11
0.75 ± 0.08
airfoil (4%)
0.64 ± 0.09
0.66 ± 0.10
0.71 ± 0.07
0.78 ± 0.10
0.68 ± 0.07
airfoil (5%)
0.62 ± 0.08
0.63 ± 0.09
0.72 ± 0.05
0.77 ± 0.06
0.68 ± 0.06
airfoil (6%)
0.63 ± 0.06
0.62 ± 0.07
0.72 ± 0.04
0.77 ± 0.05
0.66 ± 0.05
airfoil (7%)
0.59 ± 0.05
0.60 ± 0.06
0.71 ± 0.05
0.75 ± 0.04
0.64 ± 0.04
airfoil (8%)
0.59 ± 0.04
0.57 ± 0.06
0.70 ± 0.05
0.74 ± 0.03
0.61 ± 0.04
airfoil (9%)
0.57 ± 0.03
0.55 ± 0.05
0.70 ± 0.05
0.73 ± 0.03
0.58 ± 0.03
behavior (2%)
4.15 ± 2.73
5.04 ± 2.58
erreur
erreur
5.26 ± 3.59
behavior (3%)
2.64 ± 1.56
3.84 ± 1.76
3.64 ± 3.68
3.08 ± 1.74
3.26 ± 1.81
behavior (4%)
2.42 ± 0.82
3.60 ± 1.48
3.98 ± 2.91
3.14 ± 0.97
3.09 ± 1.21
behavior (5%)
2.48 ± 0.61
3.39 ± 1.03
3.83 ± 2.25
2.61 ± 0.67
3.00 ± 0.92
behavior (6%)
2.58 ± 0.74
3.66 ± 0.60
3.64 ± 1.75
2.72 ± 0.53
3.06 ± 0.76
behavior (7%)
2.49 ± 0.97
3.52 ± 0.76
3.05 ± 1.19
2.76 ± 0.96
2.93 ± 0.88
behavior (8%)
2.57 ± 0.83
3.32 ± 0.68
3.13 ± 0.77
2.77 ± 0.87
2.79 ± 0.69
behavior (9%)
2.55 ± 0.73
3.35 ± 0.60
2.69 ± 0.81
2.61 ± 0.87
2.78 ± 0.52
concrete (2%)
0.49 ± 0.12
0.60 ± 0.14
0.60 ± 0.17
0.60 ± 0.10
0.61 ± 0.13
concrete (3%)
0.46 ± 0.09
0.57 ± 0.11
0.58 ± 0.14
0.59 ± 0.10
0.62 ± 0.10
concrete (4%)
0.46 ± 0.12
0.58 ± 0.12
0.53 ± 0.14
0.56 ± 0.12
0.61 ± 0.11
concrete (5%)
0.49 ± 0.11
0.59 ± 0.12
0.55 ± 0.13
0.56 ± 0.09
0.62 ± 0.10
concrete (6%)
0.48 ± 0.08
0.53 ± 0.09
0.53 ± 0.10
0.53 ± 0.08
0.59 ± 0.11
concrete (7%)
0.47 ± 0.07
0.52 ± 0.10
0.50 ± 0.09
0.51 ± 0.08
0.58 ± 0.09
concrete (8%)
0.45 ± 0.07
0.53 ± 0.09
0.47 ± 0.09
0.48 ± 0.06
0.55 ± 0.08
concrete (9%)
0.43 ± 0.06
0.47 ± 0.07
0.47 ± 0.07
0.47 ± 0.05
0.54 ± 0.07
crimepredict (2%)
0.15 ± 0.02
0.18 ± 0.03
0.15 ± 0.03
0.16 ± 0.02
0.15 ± 0.02
crimepredict (3%)
0.15 ± 0.03
0.17 ± 0.03
0.15 ± 0.03
0.16 ± 0.04
0.15 ± 0.02
crimepredict (4%)
0.14 ± 0.02
0.16 ± 0.02
0.14 ± 0.02
0.16 ± 0.03
0.14 ± 0.01
crimepredict (5%)
0.14 ± 0.02
0.17 ± 0.02
0.15 ± 0.02
0.17 ± 0.02
0.15 ± 0.02
crimepredict (6%)
0.15 ± 0.01
0.17 ± 0.01
0.15 ± 0.01
0.17 ± 0.02
0.15 ± 0.01
crimepredict (7%)
0.14 ± 0.01
0.17 ± 0.01
0.15 ± 0.01
0.17 ± 0.02
0.15 ± 0.01
crimepredict (8%)
0.14 ± 0.01
0.17 ± 0.01
0.14 ± 0.01
0.16 ± 0.02
0.14 ± 0.00
crimepredict (9%)
0.14 ± 0.01
0.16 ± 0.01
0.14 ± 0.01
0.16 ± 0.02
0.14 ± 0.01
L'approche LapS3L donne de meilleurs résultats sur
les jeux de données behavior, concrete
et crimepredict. Seul le jeu de
données airfoil est partagé
entre LapS3L et LapRLS. Notons que le
jeu de données behavior, qui comporte un très
faible nombre d'individus, ne permet pas d'obtenir suffisamment
de vecteurs supports pour le ν-SVR en ne conservant que 2% des
labels, et ne permet pas à l'algorithme SSSL de
trouver une solution, puisque la matrice de covariance est
toujours trop faible.
Application aux données de réseau d’assainissement
Dans cette section, nous utilisons un jeu de données dont le but
est la reconstitution de l'âge des canalisations des réseaux
d'assainissement de la ville de Lyon. L'inspection des
canalisations est une tâche complexe, et étant donné le faible
nombre de canalisations inspectées chaque année, il est
nécessaire de privilégier l'inspection des canalisations les
plus dégradées.
Pour savoir quelles canalisations sont dégradées, il est
nécessaire d'en connaître la date de pose
,
qui indique l'âge et les techniques employées (celles-ci ont
évolué au cours du dernier siècle).
Parmi les 85766 canalisations recensées, 24% seulement ont une
date de pose connue. Le jeu de données est composé de 4
variables catégorielles (forme, matériau, type d'effluent, et si
la canalisation fait partie du réseau structurant), et 3
variables continues (largeur, hauteur, longueur).
Pré-traitement des données
D'après les registres de pose, il y a toujours eu chaque année
une quantité comparable de canalisations posées, si l'on exclut
les périodes de guerre. En revanche, les informations
historiques qui nous sont parvenues ne nous permettent de
connaître principalement que les dates de pose des canalisations
récentes (voir figure ). Le
réseau ne s'est pas construit uniquement à partir de 1975 ; les
dates de pose des canalisations anciennes (qui sont l'objectif
principal de l'application) sont majoritairement inconnues.
Histogramme montrant la répartition des dates de pose des
canalisations connues.
En effectuant un apprentissage sur ces données, les
canalisations anciennes sont majoritairement ignorées ou
considérées comme des observations anormales. Or, ce sont
précisément ces canalisations dont on veut connaître la date de
pose.
Nous avons donc ré-échantillonné le jeu de données, afin de
sélectionner 2000 conduites dont la date de pose suit une loi
uniforme (en sachant qu'il existe des périodes entières pendant
lesquelles aucune canalisation n'est connue ; la canalisation
est donc tirée au bord de ces périodes), et 2000 canalisations
parmi tout l'ensemble de données pour le jeu de données non
labellisé.
Résultats
La métrique évaluée est la RMSE. Les trois algorithmes comparés
sont LapS3L, SSSL
et LapRLS (non-linéaire). L'erreur de régression en
année est donnée par la table . Notre
approche donne une erreur de régression plus faible.
Métrique RMSE pour le jeu de données d'assainissement en année
pour
LapS3L,
SSSL,
LapRLS
LapS3L
SSSL
LapRLS
8.69
10.03
13.70
L'évolution de la performance de l'algorithme en fonction du
nombre de composantes s (figure
) montre qu'il est nécessaire de
conserver un grand nombre de composantes pour un bon
fonctionnement de l'algorithme. C'est un avantage
de LapS3L, puisque lorsque le nombre de composantes
extraites est supérieur au rang de la matrice de covariance,
SSSL ne donne pas de solution, alors que la
régularisation effectuée par LapS3L le permet.
L'erreur de régression de LapRLS est une constante,
puisqu'elle ne dépend pas du nombre de composantes. L'erreur de
régression pour SSSL diminue jusqu'à atteindre son
minimum pour 100 composantes principales, puis elle monte très
abruptement. L'erreur de régression de LapS3L suit
celle de SSSL, remonte moins abruptement entre 100
et 200 composantes, puis baisse à nouveau jusqu'à 2000
composantes, en atteignant le minimum pour les trois
algorithmes, après quoi elle augmente elle aussi très
abruptement.
Évolution de la performance
de LapS3L, SSSL,
et LapRLS, en fonction du nombre de composantes
sélectionnées (en échelle logarithmique)
Conclusion
Nous avons proposé un algorithme de régression semi-supervisé,
LapS3L, comme une extension stricte de
l'algorithme SSSL. Par conséquent, au prix
d'un tuning plus précis, LapS3L a
donné de meilleures performances que son concurrent. Nous avons
montré expérimentalement que pour un tuning de même complexité
pour SSSL et LapS3L, LapS3L
donne une plus faible erreur de régression sur les deux jeux de
données publics utilisés dans l'article d'origine
de SSSL. Nous avons montré également que
LapS3L est compétitif sur d'autres jeux de données
de régression. Enfin, nous avons montré expérimentalement
l'importance de la régularisation employée dans un cas
d'application réelle.
Régression semi-supervisée multi-labels : une approche régularisée
Dans ce chapitre, nous reprenons le travail décrit dans le
chapitre précédent, pour l'étendre dans le cadre de
l'apprentissage multi-labels. Nous menons également une étude
expérimentale détaillée sur des jeux de données publics
spécifiques.
L'idée de cette extension consiste à modifier la
régularisation employée. En effet, il est possible d'employer
des régularisations multi-labels, or la régularisation
employée pour LapS3L ne l'est pas.
Introduction
L'un des défis principaux de l'apprentissage automatique moderne
consiste à apprendre à partir de données labellisées à la main
ainsi que de données non labellisées, qui sont généralement plus
faciles à obtenir. L'apprentissage faiblement labellisé
, et plus particulièrement
l'apprentissage semi-supervisé
,
abordent ce défi en utilisant soit des approches de propagation
de labels pour suppléer des méthodes supervisées
,
ou utilisent l'information des labels comme contraintes pour des
méthodes non supervisées
.
De nombreuses méthodes semi-supervisées fondées sur des méthodes
supervisées ont été proposées. Par exemple, on retrouve des
adaptations telles que le self-training ou co-training,
des cas d'apprentissage transductif, ou
des méthodes génératives .
Dans le cas particulier de la régression, avec une prédiction
numérique, des applications spécifiques sont proposées
,
et on retrouve principalement des approches fondées sur
l'apprentissage de représentation de l'espace
ou utilisant un graphe entre
individus tenant compte de la similarité
, avec une
insistance particulière sur la régularisation Laplacienne
.
De plus, l'apprentissage multi-labels vise à exploiter les
relations entre labels pour apporter plus
d'information à la tâche d'apprentissage. Des travaux théoriques
ont été proposés , et de
nombreuses méthodes multi-labels ont été proposées
. Certaines
stratégies transforment un problème multi-labels en plusieurs
problèmes mono-label
, et il
est parfois possible d'étendre directement le problème au cadre
multi-labels, comme pour les processus gaussiens
.
De nombreux algorithmes d'apprentissage multi-labels minimisent
une fonction objectif régularisée. Ce peut être avec une
régularisation non-convexe , mais
les approches convexes sont plus fréquentes, avec l'adaptation
de l'algorithme LASSO
au cadre multi-labels
, ou le
Clustered Multik-Task Learning, ou d'autres approches d'apprentissage de
représentation de l'espace des labels
.
Pour l'apprentissage de régression, les méthodes spécifiques
sont plus rares. Il est d'usage de modifier la fonction objectif
pour utiliser des labels à valeurs réelles
.
Travaux liés
Pour l'apprentissage de régression mono-label, nous avons
démontré l'intérêt d'utiliser une version régularisée de
l'algorithme SSSL
grâce à la régularisation Laplacienne. La caractéristique
principale de cette famille d'algorithmes réside dans leur
fonctionnement en deux étapes, qui permettent dans un premier
temps de faire un changement d'espace non-supervisé
propice à l'apprentissage de régression de certains jeux de
données, puis d'adopter une régression linéaire
dans ce nouvel espace.
Pour rappel, l'utilisation de la régularisation Laplacienne dans
le nouvel espace permet de lier les deux espaces de description
des individus, dans le but de satisfaire l'hypothèse suivante :
Si deux individus sont proches dans l'espace réel, alors l'écart
de prédiction doit être faible.
Nous avons montré expérimentalement que la complexité
supplémentaire due à l'introduction de cette régularisation ne
nécessite pas de procédure de tuning plus complexe.
Comme évoqué ci-dessus, il est aussi possible d'utiliser la
régression Laplacienne pour traiter le problème d'apprentissage
multi-labels . Dans cette approche, on
construit un graphe des labels, et il s'agit de régulariser le
modèle de façon à introduire l'hypothèse suivante :
Si deux labels sont similaires, les valeurs du modèle pour ces
deux labels doivent être similaires.
Approche proposée : LSMR
Notations
Les individus sont décrits dans l'espace des variables supposé
être de
dimension d, \mathbb{R}^{d}. L'ensemble
des labels est de dimension m. Étant donné que le
problème est celui de la régression, cet espace est décrit
dans \mathbb{R}^{m}.
Notons \mathcal{V} \in \mathbb{R}^{N, d} la matrice
de données, dont les lignes correspondent aux individus. On note
n_l le nombre d'individus labellisés au total.
Associée à cette matrice de données, la matrice de labels de
régression Y \in \mathbb{R}^{N, m} contient une
ligne par individu ; seules les lignes correspondant aux
individus labellisés sont renseignées. On suppose que tous les
labels sont manquants simultanément : si un individu est
labellisé, les valeurs de tous les labels sont
renseignés. Sinon, aucune valeur n'est renseignée.
Première étape : changement d’espace
Comme pour l'algorithme SSSL
et LapS3L, une première étape consiste à choisir
une fonction noyau symétrique, \kappa \colon \mathbb{R}^d
\times \mathbb{R}^d \to \mathbb{R}, et à construire la
matrice noyau entre tous les individus de l'ensemble
d'apprentissage :
K étant une matrice symétrique réelle, on peut en
extraire les s valeurs propres réelles les plus
élevées, pour s \leq N, et les vecteurs propres
associés. Ces derniers forment une matrice U \in
\mathbb{R}^{N,s}, dont les colonnes sont de norme
unitaire, où chaque ligne correspond à un individu de l'ensemble
d'apprentissage. Étant donné que l'on n'utilise pas la matrice
de labels, cette première étape est non supervisée.
Le changement d'espace s'obtient en posant :
X \gets K U
La matrice X comprend donc une ligne par individu,
et nous pouvons en extraire la sous-matrice correspondant aux
individus labellisés comme X_l \in \mathbb{R}^{n,
s}.
Régularisation semi-supervisée multi-labels
En reprenant l'algorithme LapS3L, la régression
semi-supervisée qui définit la seconde étape de l'algorithme
utilise deux termes de régularisation :
une régularisation Laplacienne,
une régularisation Ridge, qui pénalise la
complexité du modèle.
Nous proposons de remplacer le terme de
régularisation Ridge en régularisation Laplacienne
multi-labels. Ainsi, en définissant le graphe des labels par la
matrice d'adjacence M_m \in \mathbb{R}^{m, m}, et
le graphe des individus par la matrice d'adjacence M_s \in
\mathbb{R}^{N, N}, le terme à pénaliser devient :
W \in \mathbb{R}^{d, m}
\left\|X_l W - Y_l\right\|_F^2 + \alpha \mathrm{tr} (W'X'L_sXW) + \beta \mathrm{tr} (W L_m W')
où :
\alpha est le régulariseur semi-supervisé ;
\beta est le régulariseur multi-labels ;
L_s est la matrice Laplacienne du graphe des
individus,
L_s = D_s - M_s
avec D_s la matrice de degré du graphe des
individus,
\forall i \in \{1, ..., N\}, \quad {D_s} (i, i) = \sum_{j = 1}^N {M_s} (i, j)
L_m est la matrice Laplacienne du graphe des labels,
L_m = D_m - M_m
avec D_m la matrice de degré du graphe des labels,
\forall k \in \{1, ..., m\}, \quad {D_m} (k, k) = \sum_{l = 1}^m {M_m} (k, l)
La pénalisation est rendue explicite sur des exemples figure
. En haut, le graphe est
construit à partir de 4 individus ; la proximité dans l'espace
des variables est indiquée par une arête. En bas, le graphe est
construit à partir de 3 labels ; une arête relie deux labels
ayant souvent des valeurs similaires sur beaucoup
d'individus. Pour l'apprentissage semi-supervisé, en haut, les
labels sont considérés de manière indépendante. On note à
l'intérieur du cercle la valeur prédite par le modèle pour un
label. Pour l'apprentissage multi-labels, en bas, chaque label a
un modèle linéaire, dont les poids sont représentés sur une
colonne. La valeur de chaque poids du modèle est représentée par
une couleur différente. Dans la partie gauche de la figure, la
pénalisation est faible, puisque le modèle donne des valeurs
similaires aux individus liés (en haut) et les modèles sont
similaires pour des labels reliés (en bas). À droite, la
pénalisation est plus forte.
Exemples de pénalisation pour l'apprentissage semi-supervisé
(en haut) et l'apprentissage multi-labels (en bas)
Dans la suite, nous appellerons la modification
proposée LSMR, pour Laplacian-regularized
Simple algorithm for Semi-supervised multi-labels
Regression. La modification proposée de l'algorithme
LapS3L consiste toujours en une extension de
l'algorithme SSSL, mais sa différence
avec LapS3L réside dans un autre choix pour la
régularisation Ridge.
Algorithme d’optimisation
La fonction objectif employée dans
l'algorithme LapS3L admet une solution analytique,
qui permet d'obtenir la valeur du modèle W grâce à
une résolution d'un système linéaire de dimension s \times
s. Malheureusement, on ne peut pas l'appliquer
directement pour LSMR, à moins d'avoir à résoudre
m^2 systèmes linéaires distincts. Cette limitation
est commune à beaucoup de méthodes de régularisation
multi-labels, ce qui pousse les méthodes de MALSAR à adopter une
méthode d'optimisation différente.
Descente de gradient
La fonction objectif obtenue dans
présente les caractéristiques suivantes :
la variable d'optimisation, W, est réelle ;
la fonction objectif est convexe, si les arêtes des matrices
d'adjacence des graphes des individus et des labels sont à
poids positifs ;
la fonction objectif est lisse.
Par conséquent, le problème peut être résolu par descente de
gradient, dont le calcul est donné par
.
2 \left[X_l' X_l + \alpha X' L_s X\right] W - 2 X_l' Y_l + 2 \beta W L_m
Pas d’apprentissage
L'algorithme de descente du gradient produit des itérations de
descente de l'erreur d'apprentissage jusqu'à convergence de la
variable d'optimisation. Chaque itération consiste à calculer la
valeur du gradient au point donné pour la valeur courante de la
variable d'optimisation, \nabla_W (selon
), puis poser :
W \gets W - \eta \nabla_W
où \eta est le pas d'apprentissage.
Dans notre cas, le gradient est
une fonction Lipschitzienne : pour deux valeurs quelconques du
modèle, P, Q \in \mathbb{R}^{s, m},
\left\|\nabla_W (P) - \nabla_W (Q)\right\|_F^2 \leq C \left\|P - Q\right\|_F^2
Pour toute matrice M symétrique réelle, \rho
(M) désigne le rayon spectral de M,
c'est-à-dire sa plus grande valeur propre. En posant :
\eta \gets \frac 1 C
La convergence de l'algorithme de descente de gradient est
assurée .
Initialisation du modèle
Le modèle W \in \mathbb{R}^{s, m} est initialisé
comme la solution du problème de régression linéaire, avec un
terme de régularisation Ridge utilisant une valeur de
régulariseur faible.
W \gets \left[X_l' X_l + \epsilon I_s\right]^{-1} X_l' Y_l
avec \epsilon faible (pour l'implémentation, nous
avons retenu \epsilon = 10^{-6}), et I_s \in
\mathbb{R}^{s, s} la matrice identité en
dimension s.
Descente de gradient accélérée
L'algorithme de descente de gradient accélérée
est une amélioration de l'algorithme de
descente de gradient originale qui propose une convergence plus
rapide. Pour notre application, l'algorithme d'optimisation est
résumé dans l'algorithme
. La prédiction s'effectue
ainsi avec l'algorithme
, qui est simplement la
version multi-labels de l'algorithme de prédiction de
l’algorithme LapS3L développé dans le chapitre
précédent, en remplaçant le modèle de dimension s
par un modèle de dimension s \times m.
\mathcal{V} \in \mathbb{R}^{N, d}Y \in \mathbb{R}^{n_l, m}s \in \{1, ..., N\}\kappa \colon \mathcal{X} \times \mathcal{X} \to \mathbb{R}matrice Laplacienne du graphe des individus, L_s \in \mathbb{R}^{N, N}matrice Laplacienne du graphe des labels, L_m \in \mathbb{R}^{m, m}\alpha > 0\beta > 0
Construire la matrice K \in \mathbb{R}^{N,
N} : \forall i, j, \quad K_{i, j} =
\kappa (\mathcal{V}_{i, .}, \mathcal{V}_{j,
.})
Décomposer la matrice K en valeurs propres et
vecteurs propres, sélectionner les s vecteurs
propres ayant la plus grande valeur propre
associée : U \in \mathbb{R}^{N, s}
Poser X := K U
Sélectionner la sous-matrice Xl \in
\mathbb{R}^{n,s} composée des lignes
de X correspondant aux individus labellisés
Appliquer l’algorithme de descente de gradient accélérée, en
utilisant les paramètres suivants :
Pas d'apprentissage : \frac 1 C, C = 2
\left(\rho \left(X_l' X_l + \alpha X'L_sX\right) + \beta
\rho (L_m)\right)
Modèle initial : W \in \mathbb{R}^{s, m} =
\left[X_l' X_l + \epsilon I_s\right]^{-1} X_l' Y_l
Calcul du gradient : \nabla_W \gets 2 \left[X_l' X_l
+ \alpha X' L_s X\right] W - 2 X_l' Y_l + 2 \beta W
L_mU \in \mathbb{R}^{N, s}W \in \mathbb{R}^{s, m}
Algorithme LSMR : apprentissage
\mathcal{V} \in \mathbb{R}^{N, d}, \mathcal{V}_t \in \mathbb{R}^{n_t, d}\kappa \colon \mathcal{X} \times \mathcal{X} \to \mathbb{R}U \in \mathbb{R}^{N, s}W \in \mathbb{R}^{s, m}
Construire la matrice K_b \in \mathbb{R}^{N,
n_t} :
\forall i, j, \quad {K_b}_{i, j} = \kappa (\mathcal{V}_{i, .}, {\mathcal{V}_t}_{j, .})
Poser X_t := K_b' U\hat Y \gets X_t W
Algorithme LSMR : prédiction
Étude comparative
Afin de s'assurer de la performance de notre approche, nous
proposons deux études expérimentales. Tout d'abord, puisqu'elle
généralise une approche existante, nous devons nous assurer que
cette extension est nécessaire. Puis nous montrerons quelques
comparaisons avec d'autres régularisations pour de la régression
multi-labels.
Jeux de données utilisés
Nous avons utilisé des jeux de données du projet MULAN
http://mulan.sourceforge.net/datasets-mtr.html
, décrits dans
, à quoi
nous avons ajouté un échantillon de 1000 individus du jeu de
données SARCOS . Nous n'avons pas
conservé tous les jeux de données, les plus grands contenant
trop d'individus pour appliquer directement l'algorithme
LSMR. Les jeux de données et leurs caractéristiques sont résumés
dans la table .
Jeux de données utilisés pour l'étude expérimentale de notre
approche, LSMR
Jeu de données
Nb. indiv. (avec label + sans)
Test
Variables
Labels
atp1d
262 (76 + 186)
165
411
6
atp7d
234 (67 + 167)
147
411
6
edm
121 (35 + 86)
73
16
2
enb
601 (173 + 428)
366
8
2
jura
281 (81 + 200)
173
15
3
oes10
314 (91 + 223)
198
298
16
oes97
257 (75 + 182)
163
263
16
osales
495 (144 + 351)
309
401
12
sarcossub
779 (225 + 554)
467
21
7
scpf
889 (256 + 633)
521
23
3
sf1
250 (73 + 177)
158
31
3
sf2
832 (240 + 592)
501
31
3
wq
827 (238 + 589)
487
16
14
Nous avons divisé les jeux de données en une partie pour
l'apprentissage et une partie pour le test. Ces jeux de données
étant labellisés, nous avons sélectionné 30% des individus de
l'ensemble d'apprentissage pour en supprimer les labels, pour
tous les labels simultanément. Le nombre de labels enlevé est
bas, surtout comparé au travail effectué
pour LapS3L. Cependant le nombre d'individus total
étant relativement faible, il n'est pas possible d'en enlever
davantage.
Nous avons centré et réduit toutes les variables, et tous les
labels, en soustrayant la moyenne et divisant par
l'écart-type. Ceci garantit que l'on peut appliquer à la fois
une fonction noyau entre les individus à partir des variables,
et à la fois une fonction noyau entre les labels à partir des
données labellisées. D'autre part, si les valeurs de l'un des
labels sont négligeables devant les valeurs d'un autre, le
calcul des métriques multi-labels risque de ne pas montrer la
pertinence des algorithmes en tant qu'algorithmes multi-labels.
Protocole expérimental
La procédure de tuning consiste à tirer une valeur pour chaque
hyperparamètre, selon la recherche aléatoire
. Cette méthode permet d'éviter
l'écueil de la recherche de grille, qui considère
tous les hyperparamètres comme équitablement importants. Dans le
cas où l'algorithme présente de nombreux hyperparamètres, comme
par exemple LSMR, la recherche aléatoire est à
préférer.
Les hyperparamètres donnant la meilleure métrique aRMSE en
validation croisée à 10 folds sont retenus. Pour
rappel, la métrique aRMSE est définie par :
\hat Y désignant la prédiction sur le jeu de
test, Y les vrais labels du jeu de test,
et n_t le nombre d'individu du jeu de test.
La métrique doit être minimisée. Puisque l'on a normalisé les
labels individuellement, si les labels du jeu de test suivent
exactement la même distribution que le jeu d'apprentissage, la
métrique est égale à 1 en prédisant toujours 0.
La validation croisée en 10 folds consiste à
partitionner les données labellisées de l'ensemble
d'apprentissage en 10 échantillons. L'apprentissage se fait sur
9 échantillons, plus toutes les données non labellisées. Le test
se fait sur l'échantillon restant, en calculant la métrique
aRMSE. En répétant l'opération sur les 10 échantillons pour le
test, la métrique aRMSE moyenne est calculée.
Notre approche utilise 4 hyperparamètres de différentes
natures :
La fonction noyau, \kappa ;
Le nombre de composantes principales, s ;
Le régulariseur semi-supervisé, \alpha ;
Le régulariseur multi-labels, \beta.
Comme pour l'algorithme LapS3L, nous étudions
différentes fonction de noyau :
le produit scalaire ;
la similarité cosinus ;
le noyau RBF.
Tuning local
En tant qu'extension de l'algorithme SSSL, nous
vérifions la pertinence des hyperparamètres introduits. Nous
commençons par rechercher le noyau et le nombre de composantes
pour minimiser l'erreur de régression de
l'algorithme SSSL. Les valeurs obtenues sont
résumées dans la table .
Valeur des hyperparamètres minimisant l'erreur de régression
de l'algorithme SSSL sur les jeux de données
étudiés
Jeu de données
Noyau
Nombre de composantes
atp1d
RBF, \gamma = 3.140 \cdot 10^{-05}
202
atp7d
produit scalaire
5
edm
RBF, \gamma = 1.703 \cdot 10^{+01}
107
enb
similarité cosinus
10
jura
RBF, \gamma = 4.272 \cdot 10^{-03}
87
oes10
produit scalaire
31
oes97
RBF, \gamma = 3.785 \cdot 10^{-05}
55
osales
RBF, \gamma = 1.254 \cdot 10^{-02}
475
scpf
similarité cosinus
2
sf1
produit scalaire
5
sf2
similarité cosinus
3
wq
RBF, \gamma = 1.545 \cdot 10^{+01}
774
En réutilisant ces valeurs, nous cherchons celles pour les deux
autres hyperparamètres. Nous comparons avec la performance de
SSSL, en calculant l'aRMSE relative comme le
rapport entre la performance de LSMR et la performance de
SSSL. Nous obtenons plusieurs cas de figure
différents, en fonction des jeux de données. Les principaux
types sont reportés dans la suite.
Tuning local : scpf
Le jeu de données scpf regroupe des notices émises
par des habitants de certaines villes aux États-Unis à
destination de la municipalité. Ces notices sont décrites par
différentes variables, telles que la nature et la localisation
du problème signalé. Le but est de comprendre l'importance du
problème, en prédisant le nombre de vues, de clics et de
commentaires.
Le tuning local donne la figure
. Le régulariseur multi-labels
n'est pas très pertinent dans ce cas ; il faut utiliser une
valeur très faible pour obtenir une amélioration de l'algorithme
SSSL. La zone où le tuning donne de bonnes
performances est très restreinte.
aRMSE relative pour le tuning local de LSMR sur
le jeu de données scpf.
Tuning local : osales
Le jeu de données osales contient des produits
ayant eu droit à une campagne publicitaire. L'objectif est de
prédire le volume de vente de ces produits sur les 12 prochains
mois, un label par mois.
Le tuning local donne la figure
. La zone de tuning des
hyperparamètres \alpha et \beta donne
une place plus large pour lequel LSMR améliore les
résultats de SSSL, mais le meilleur point de tuning
se situe pour un regulariseur semi-supervisé faible, avec une
valeur non nulle du régulariseur multi-labels.
aRMSE relative pour le tuning local de LSMR sur
le jeu de données osales.
Tuning local : sf2
Le jeu de données sf2 considère comme individu une
période de 24h, et compte le nombre d'éruptions solaires de
différentes catégories dans cette période. La deuxième version
utilise des mesures prises en 1978.
Le tuning local donne la figure
. La zone de tuning est là aussi
plus étendue, mais le résultat est meilleur pour une grande
valeur de chacun des deux hyperparamètres.
aRMSE relative pour le tuning local de LSMR sur
le jeu de données sf2.
Tuning local : oes97
Enfin, oes97 étudie différentes villes des
États-Unis (en 1997) et étudie la répartition des emplois dans
ces zones. Le but est de faire la prédiction de certaines
catégories d'emploi en fonction des autres pour une ville
donnée.
Le tuning local donne la figure
. La zone de tuning est trop
étendue ; une valeur trop élevée du régulariseur multi-labels
fait chuter la performance de l'algorithme.
aRMSE relative pour le tuning local de LSMR sur
le jeu de données oes97.
Résultats du tuning local
En agrégeant les performances relatives sur tous les points de
tuning, on obtient la table
. Celle-ci montre que beaucoup
de points du tuning local donnent un meilleur résultat que
SSSL. L'agrégation des scores relatifs se fait avec
la moyenne, le premier et troisième quartile, le minimum et le
maximum. Sur tous les jeux de données, il existe un point où
LSMR est bien meilleur que SSSL
(valeur inférieure à 1), et un point où LSMR est
pire. En regardant les quartiles, il existe de larges zones dans
lesquelles LSMR tuné est meilleur
que SSSL.
Tuning local : aRMSE moyenne relative de LSMR
par rapport à SSSL
Jeu de données
Moyenne
Q1
Q3
Meilleur point
Pire point
sf2
0.983
0.898
1.086
0.553
1.245
scpf
1.191
0.862
1.554
0.564
1.684
osales
0.989
0.938
1.046
0.635
1.191
oes97
1.078
0.872
1.170
0.662
2.344
sf1
0.994
0.922
1.062
0.682
1.206
oes10
1.015
0.908
1.110
0.715
1.448
jura
1.014
0.954
1.065
0.799
1.485
atp1d
1.048
0.958
1.070
0.812
1.922
edm
0.998
0.964
1.037
0.821
1.190
atp7d
1.006
0.961
1.053
0.833
1.242
enb
0.998
0.964
1.027
0.864
1.124
wq
0.999
0.992
1.007
0.960
1.032
Tuning global
Nous mettons maintenant en place une approche de tuning global
de façon à comparer notre approche proposée à d'autres approches
de régularisation multi-labels pour la régression. Les méthodes
évoquées résolvent un problème de régression multi-labels
linéaire, en optimisant une fonction objectif convexe, au moyen
de l'algorithme de descente de gradient accélérée.
Ligne de base : sans régularisation
Notre ligne de base n'effectue pas de régularisation, elle est
notée LSQ (pour least squares).
Régularisation Lasso
La régularisation l_1 permet d'obtenir des parties
du modèle ayant une valeur nulle
. Nous le
notons MTL (multi-task learning). La
régularisation est donnée par :
C'est la régularisation employée dans
l'algorithme LSMR. On la désigne
par SGR, pour sparse graph
regularization. Le graphe est
construit avec des poids utilisant la similarité cosinus entre
les labels, d'après les valeurs qu'ont les
individus. Avec M la matrice
d'adjacence, D la matrice de degré
et L la matrice Laplacienne du graphe, la
régularisation est :
L'algorithme JFS (joint feature
selection) tel que défini par
utilise le Lasso
par groupe. La régularisation employée est :
\left\|W\right\|_{2, 1} = \sum_{j = 1} ^ d \left\|W_{j, .}\right\|_2^2
Régularisation du rang
La régularisation du rang peut s'effectuer en régularisant la
norme trace , TNR (trace
norm regularization), c’est-à-dire la somme de toutes les
valeurs propres. La régularisation employée est :
CMTL est la version convexe de cet algorithme
. L'optimisation se fait sur deux
variables, le modèle W et une matrice symétrique
semi-définie positive M telle que I -
M est aussi semi-définie positive.
La table montre les résultats des
différentes approches. Nous remarquons que :
notre approche, pour un tuning global, est meilleure
que SSSL, cependant le tuning local est
insuffisant ;
notre approche est souvent meilleure que la régularisation multi-labels SGR ;
le tuning global pour notre approche donne très souvent de
meilleurs résultats que le tuning local ;
contrairement à SSSL, notre approche donne des
résultats comparables à l'état de l'art sur les jeux de
données considérés, pour des approches de régularisation.
Résultats du tuning global, métrique aRMSE
Jeu de données
LSMR
LSMR local
SSSL
CMTL
DM
JFS
LSQ
MTL
SGR
TNR
atp1d
0.472
1.006
0.481
0.533
0.522
0.543
0.549
0.534
0.548
0.548
atp7d
0.888
0.713
0.779
0.727
0.782
0.764
0.787
0.787
0.787
0.787
edm
0.841
1.005
0.895
0.849
0.857
0.856
1.198
0.855
1.207
0.852
enb
0.320
0.541
0.339
0.332
0.333
0.332
0.332
0.332
0.332
0.332
jura
0.661
0.847
0.727
0.597
0.593
0.591
0.609
0.593
0.611
0.598
oes10
0.390
0.488
0.395
0.398
0.402
0.402
0.402
0.402
0.402
0.402
oes97
0.445
0.918
0.494
0.515
0.510
0.534
0.534
0.534
0.534
0.534
osales
1.012
0.957
0.938
0.882
0.839
0.861
0.921
0.873
0.873
0.906
sarcossub
0.363
0.816
0.428
0.357
0.357
0.354
0.357
0.354
0.357
0.357
scpf
1.111
0.926
1.253
0.621
0.636
0.635
0.635
0.635
0.635
0.635
sf1
1.070
0.998
1.092
0.999
0.999
0.999
1.292
0.999
1.285
0.999
sf2
0.973
1.041
1.114
1.022
1.161
1.024
1.262
1.024
1.249
1.024
wq
0.999
0.999
1.003
0.946
1.006
0.982
1.079
0.947
1.079
1.023
Validation statistique
Afin de savoir comment se positionnent les algorithmes les uns
par rapport aux autres, nous effectuons un test statistique en
suivant la méthodologie indiquée dans
.
t-test par paires
En considérant une paire d'algorithmes, il est possible de
calculer la différence entre les performances de ces deux
algorithmes sur chaque jeu de données. Lorsque l'on prend la
moyenne de cette différence, à supposer qu'elle s'applique sur
un grand nombre de jeux de données, on peut effectuer un test
pour savoir si cette moyenne est positive, ou pour savoir si
elle est négative. Cela permettrait de savoir si l'un des
algorithmes est relativement meilleur que l'autre.
Comme nous n'avons que 13 jeux de données, il n'est pas possible
de considérer les performances de chaque algorithme comme un
échantillon gausssien, ce qui pose une limite assez claire à
cette approche.
De plus, les jeux de données contenant très peu d'individus ont une
performance très variable.
Test de Wilcoxon
Ce test permet aussi de départager deux algorithmes, mais il ne
se fonde plus sur les valeurs de la métrique envisagée mais sur
les rangs des algorithmes. Plus précisément, on calcule les
différences entre les deux algorithmes sur chaque jeu de données
en valeur absolue, puis on trie ces différences absolues. Pour
chaque algorithme, on sélectionne les différences qui sont en
faveur de cet algorithme, et on somme leurs rangs. En prenant
une valeur de \alpha = 0.1, on obtient la figure
. Sur cette figure, une
cellule bleue indique que l'algorithme en ligne bat l'algorithme
en colonne. Une cellule rouge indique que l'algorithme en
colonne bat l'algorithme en ligne. Notre généralisation est
meilleure que l'algorithme SSSL.
Résultat du test de comparaison par paires d'algorithmes de
Wilcoxon
Tests de Friedman et Nemenyi
Le test de Friedman permet de rejeter l'hypothèse suivante en se
fondant sur les rangs des approches : tous les régresseurs sont
équivalents, c'est-à-dire que le rang moyen de tous les
régresseurs est égal. Cette hypothèse est rejetée dans notre cas
pour un risque \alpha = 0.05.
Puisque le rang moyen n'est pas égal, le test de Nemenyi permet
d'établir la distance critique entre rangs moyens. Si des
algorithmes ont une différence entre leurs rangs moyens
supérieure à cette distance critique, ils ne sont pas
équivalents. La figure montre
les rangs des algorithmes, ainsi que la distance critique. On
constate que notre approche, même si elle n'obtient pas le
meilleur rang moyen, est dans le groupe du meilleur algorithme,
contrairement aux deux approches sur lesquelles elle est fondée.
Résultat du test de comparaison par paires d'algorithmes de
Nemenyi
Conclusion
Nous avons proposé une extension de
l'algorithme SSSL adapté à l'apprentissage
multi-labels, en réutilisant la régularisation Laplacienne que
nous avions développée dans l'algorithme
LapS3L. Expérimentalement, cette approche donne une
erreur de régression multi-labels plus faible
que SSSL, même en réutilisant une partie du tuning
des hyperparamètres. En optimisant les hyperparamètres de façon
globale, l'approche demeure compétitive avec des méthodes
représentatives de l'état de l'art.
Sélection de variables semi-supervisée en multi-régressions
Les deux travaux présentés dans les chapitres précédents,
LapS3L et sa version
multi-labels, LSMR, utilisent
une extraction de variables non supervisée pour
réduire la dimension du problème.
Dans certains cas d'application, cependant, la sélection
de variables est une tâche plus abordée puisqu'elle
rend le modèle interprétable. Dans ce chapitre,
nous proposons de résoudre cette tâche dans un cadre à la fois
multi-labels et semi-supervisé pour les problèmes de
régression, et montrons son efficacité sur des jeux de données
multi-labels publics issus de la littérature.
L'idée de cette méthode consiste à guider la sélection de
variables par la sélection de labels : en effet,
si les performances d'apprentissage sont dégradées pour
certains labels, il n'est pas nécessaire de les conserver pour
la sélection de variables.
Introduction
Dans le cas d'apprentissage multi-labels dont l'espace de
description des individus est de grande dimension, ce qui arrive
pour des données textuelles ou d'images par exemple, la présence
de trop de variables par rapport au nombre d'individus peut
mener à un sur-apprentissage. Pour empêcher cela, la sélection
de variables multi-labels a pour objectif de trouver un
sous-ensemble de variables pertinentes pour tous les labels,
permettant d'obtenir une meilleure erreur de régression, de
réduire la dimension du problème et de produire un modèle plus
simple et interprétable.
Dans ce chapitre, nous proposons un algorithme de sélection de
variables semi-supervisé et multi-labels, adapté aux problèmes
de régression. Tout d'abord, nous rappelons le contexte ainsi
que les travaux existants sur lesquels nous nous
appuyons. Ensuite, nous développons l'algorithme, à partir de
l'explicitation de notre intuition. Enfin, pour valider notre
approche, nous proposons une étude expérimentale comparative sur
des jeux de données de régression multi-labels.
Travaux liés
L'approche que nous proposons s'inspire principalement de l'algorithme
MIFS (Multi-label Informed Feature
Selection) dans les travaux de , de
façon à fonctionner dans le cadre semi-supervisé, et en
régression. Nous proposons également des éléments de
l'apprentissage robuste et de la sélection de labels.
Dans le cadre de la sélection de variables,
l'algorithme MIFS propose un embedding
des labels. Ainsi, les variables ne sont pas sélectionnées pour
améliorer la prédiction des vrais labels, mais des labels
extraits. L'avantage de cette approche est que des valeurs
bruitées dans l'ensemble d'apprentissage perturberont peu la
sélection de variables. En revanche, la méthode ne peut pas
servir directement en prédiction pour faire simultanément de la
sélection de variables et de la régresssion multi-labels.
Pour rappel, l'algorithme MIFS vise à minimiser la
fonction objectif suivante :
W \in \mathbb{R}^{d, o},
V \in \mathbb{R}^{n, o},
B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2
+ \alpha \left\|Y - VB\right\|_F^2
+ \beta \mathrm{tr} \left(V'LV\right)
+ \gamma \left\|W\right\|_{2, 1}
Cette fonction objectif se décompose en 4 termes :
L'erreur de régression pour prédire les labels extraits ;
La précision de l'extraction des labels ;
La cohérence des labels extraits ;
La sélection de variables, sur le modèle prédisant les labels
extraits.
Cependant, la pénalisation de l'extraction de labels prévue par
MIFS n'est pas suffisante dans les cas où certains
des labels dont on souhaite effectuer la prédiction ne peuvent
tout simplement pas être traités. Si de tels labels sont
présents dans le jeu de données, la prédiction pour ces labels
sera mauvaise quelles que soient les variables sélectionnées :
il ne faut pas sélectionner de variables pertinentes pour ces
labels. De ce point de vue, la sélection de labels au service de
la sélection de variables joue un rôle différent de l'extraction
de labels telle que mise en œuvre dans
l'algorithme MIFS.
La sélection de labels peut donc être utilisée pour
l'apprentissage multi-labels . Dans ce
cas, le modèle multi-labels est décomposé en un terme utilisant
une structure commune pour la plupart des labels, et un terme
indiquant les labels non traités.
A, B
\left\|X (A + B) - Y\right\|_F^2
+ \alpha \mathcal{R} (A)
+ \beta \left\|B\right\|_{1, 2}
La notation \left\|B\right\|_{1, 2} désigne la
norme l_{1, 2} de B, c'est-à-dire la
norme l_{2, 1} de la transposée de B :
\left\|B\right\|_{1, 2}
= \sum_{l = 1} ^ m \left\|B_{., l}\right\|_2
\mathcal{R} désigne un terme de régularisation
multi-labels quelconque. Dans le cas de ,
il s'agit de la norme trace. La régularisation
\left\|B\right\|_{1, 2} ressemble au terme de
sparsité du dirty model, mais l'hypothèse est plus
forte, puisque ce terme ne correspond qu'à certains labels.
Approche proposée : RSMS
Dans cette section nous décrivons notre approche que nous
dénommons par la suite RSMS (Robust
Semi-supervised Multi-label feature Selection).
On dispose d'un ensemble d'apprentissage supervisé,
\left(
x_i \in \mathcal{X},
y_i \in \mathbb{R}^m
\right)_{i = 1} ^ {n_l}
,
auquel est adjoint un ensemble non supervisé,
\left(
x_i \in \mathcal{X}
\right)_{i = n_l + 1}^{N}
.
Tout d'abord, l'algorithme cherche à effectuer une extraction de
labels. Pour cela, on écrit la matrice de labels Y
comme suit :
Y = V B
Ceci introduit la matrice de pseudo-labels
V \in \mathbb{R}^{N, o},
et la matrice
B \in \mathbb{R}^{o, m}.
Concrètement, chaque individu labellisé de l'ensemble
d'apprentissage correspond à une ligne de V, et
chaque pseudo-label correspond à une colonne
de V. Dans le cadre semi-supervisé, on définit une
matrice diagonale
J \in \mathbb{R}^{N, N},
dont la diagonale est l'indicatrice des individus
labellisés. Pour chaque individu
i \in \{1, ..., N\},
J_{i i} = 1 si et seulement si i est
labellisé. Cette matrice nous permet donc d'affiner la
décomposition, qui ne doit porter que sur la partie labellisée :
V \in \mathbb{R}^{N, o},
B \in \mathbb{R}^{o, m}
\left\|JVB - JY\right\|_F^2
L'obtention d'un modèle d'apprentissage semi-supervisé peut
ainsi s'effectuer uniquement à partir des labels extraits. On
introduit un modèle
W \in \mathbb{R}^{d, o},
et un régulariseur
\alpha > 0.
Plus \alpha est grand, plus les labels extraits
représenteront fidèlement les vrais labels Y.
W \in \mathbb{R}^{d, o},
V \in \mathbb{R}^{N, o},
B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2
+ \alpha \left\|J V B - J Y \right\|_F^2
L'optimisation par rapport à V permet d'assigner
des pseudo-labels même aux individus non labellisés. Ce n'est
cependant pas suffisant pour tenir compte des hypothèses de
l'apprentissage semi-supervisé, puisque ces valeurs ne sont pas
contraintes. La traduction des hypothèses semi-supervisées, dans
le cadre de l'algorithme MIFS, se traduit de la
façon suivante :
Si deux individus sont proches, alors les valeurs de leurs
pseudo-labels doivent être proches.
En suivant cette hypothèse, on peut être amené à introduire une
matrice Laplacienne
L \in \mathbb{R}^{N, N}
et un nouveau régulariseur
\beta > 0,
de sorte à minimiser le problème suivant :
W \in \mathbb{R}^{d, o},
V \in \mathbb{R}^{N, o},
B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2
+ \alpha \left\|J V B - J Y \right\|_F^2
+ \beta \mathrm{tr} \left(V'LV\right)
Il reste donc deux problèmes à traiter : la sélection de
variables, et la sélection de labels au service de la sélection
de variables. Pour la sélection de variables, l'utilisation de
la norme l_{2, 1} est très répandue
. Pour rappel, il s'agit de régulariser le
terme s'appliquant sur les lignes de W :
\sum_{j = 1} ^ d \sqrt{\sum_{k = 1} ^ o W_{jk} ^ 2}
= \left\|W\right\|_{2, 1}
Ce terme permet de rendre les lignes de W éparses,
c'est-à-dire que des lignes de W tendent à être
entièrement nulles. Les lignes comportant des valeurs non nulles
indiquent des variables qui sont importantes pour
l'apprentissage de tous les pseudo-labels. Le problème devient
donc :
W \in \mathbb{R}^{d, o},
V \in \mathbb{R}^{N, o},
B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2
+ \alpha \left\|J V B - J Y \right\|_F^2
+ \beta \mathrm{tr} \left(V'LV\right)
+ \gamma \left\|W\right\|_{2, 1}
Pour effectuer la sélection de labels, notre hypothèse se
traduit donc par le fait que certaines des colonnes de la
matrice B, qui correspondent donc aux vrais labels,
seront entièrement nulles. En introduisant un terme de
régularisation supplémentaire, on obtient :
W \in \mathbb{R}^{d, o},
V \in \mathbb{R}^{N, o},
B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2
+ \alpha \left\|J V B - J Y \right\|_F^2
+ \beta \mathrm{tr} \left(V'LV\right)
+ \gamma \left\|W\right\|_{2, 1}
+ \delta \left\|B\right\|_{1, 2}
L'hypothèse semi-supervisée change également. La régularisation
\mathrm{tr} (V L V')
n'est pas pertinente, parce qu'elle s'applique de façon
indiscriminée sur tous les pseudo-labels. Ainsi, si un
pseudo-label représente l'un des labels ignorés, il ne faut pas
tenir compte de ses valeurs pour la régularisation. Ceci nous
mène à modifier l'hypothèse semi-supervisée pour la sélection de
variables aidée par la sélection de labels :
Si deux individus sont proches, alors pour chaque label
sélectionné, la reconstruction des valeurs de ce label doivent
être proches.
Nous considérons pour la reconstruction des valeurs des labels
le produit V B. Le problème final devient donc
:
W \in \mathbb{R}^{d, o},
V \in \mathbb{R}^{N, o},
B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2
+ \alpha \left\|J V B - J Y \right\|_F^2
+ \beta \mathrm{tr} \left(B'V'LVB\right)
+ \gamma \left\|W\right\|_{2, 1}
+ \delta \left\|B\right\|_{1, 2}
Le terme de régularisation semi-supervisé
\mathrm{tr} \left(B'V'LVB\right)
peut se réécrire de la façon suivante :
\sum_{k = 1} ^ m \sum_{i_1 = 1, i_2 = 1} ^ N M_{i_1, i_2}
\left(
\sum_{l = 1} ^ o \left(V_{i_1, l} - V_{i_2, l}\right) B_{l, k}
\right)^2
Par hypothèse, si un label k est ignoré, alors pour
tout
l \in \{1, ..., o\},
B_{l,k} = 0.
Par conséquent, la régularisation ne porte que sur les labels
non ignorés, notés
\mathcal {S} \subset \{1, ..., m\} :
Contrairement à l'apprentissage robuste ,
où le modèle doit rendre compte à la fois des labels
sélectionnés et des labels non sélectionnés, nous ne nous
intéressons qu'aux variables pour les labels sélectionnés. Il
n'est donc pas nécessaire de décomposer le terme B.
Optimisation
La question de l'initialisation des variables pose problème,
puisque le résultat final en dépend. Il est possible d'utiliser
des variables indépendantes suivant une loi normale, mais cela
ne permet pas de rendre l'algorithme déterministe.
En ce qui concerne W, nous avons choisi d'utiliser
l'initialisation suivante :
W^{(0)} \gets \left[X' J X + \epsilon I\right]^{-1} X' J V
Il s'agit de la solution aux moindres carrés, régularisée par
\epsilon. La valeur a été fixée
à 10^{-6}, qui est suffisamment faible pour ne pas
trop influencer l'apprentissage pour les jeux de données du type
de ceux étudiés dans l'étude expérimentale. Le
terme V_l désigne le sous-ensemble labellisé des
lignes de V.
Pour V et B, la question est plus
complexe. Pour conserver l'aspect déterministe de
l'initialisation, on ne peut pas recourir à un algorithme de
clustering de type k-means, et il n'est pas non
plus possible d'effectuer une décomposition SVD de
la matrice Y. L'initialisation retenue
pour B est une matrice diagonale rectangulaire (la
diagonale s'arrêtant prématurément, laissant des colonnes
nulles). L'initialisation pour V_l correspond donc
aux valeurs des o premiers labels. Le reste des
valeurs de V est obtenue en utilisant la valeur
initiale W^{(0)} de W sous la forme
V^{(0)} \gets X W.
L'initialisation de l'algorithme consiste donc à faire un
apprentissage des o premiers labels avec une
régularisation Ridge de paramètre 10^{-6}.
Comme pour l'algorithme MIFS, notre approche
utilise 3 variables
d'optimisation : W, V
et B. En effectuant une optimisation alternée
vis-à-vis de chacune des variables, nous pouvons vérifier que la
valeur de la fonction objectif décroît à chaque étape, ce qui
montre la convergence de notre approche.
Optimisation vis-à-vis de W, V
et B étant fixés
Le problème , si l'on ne considère
que W, peut se réécrire en :
La difficulté de ce problème réside dans le fait que le deuxième
terme n'est pas lisse. Il existe plusieurs façons de traiter ce
cas, par exemple l'implémentation MALSAR
propose une descente de gradient proximal. Dans notre cas, nous
utilisons une constante \epsilon > 0, et nous
adoptons la solution de l'algorithme RFS, en posant la matrice
diagonale D_W telle que :
Il s'agit donc de la norme l_{2,1}. En pratique,
pour vérifier la convergence de l'algorithme, si le terme
\mathrm{tr} (W' D_W W)
décroît, alors le terme \left\|W\right\|_{2, 1}
décroît aussi.
on applique une itération de l'algorithme de descente du
gradient, avec un pas d'apprentissage \frac 1
{C_W}. On constate que la fonction gradient est
Lipschitzienne, c'est-à-dire que pour toute paire de modèles
W^{(1)}, W^{(2)},
Cette fonction n'est pas lisse, à cause de la
norme l_{1,2} appliquée à B. On
applique la même astuce que pour l'optimisation par rapport à
W : on pose la matrice diagonale D_B
dont la diagonale vaut :
Une itération de descente de gradient de pas \frac 1
{C_B} permet donc de diminuer la fonction de coût.
Algorithme final
L'algorithme complet consiste
simplement à alterner les étapes d'optimisation jusqu'à
convergence. On remarque que le calcul du pas d'apprentissage
nécessite d'obtenir la plus grande valeur propre de certaines
matrices : BB' de dimension m \times
m, V'V de dimension o \times o,
et X'X de dimension d \times d (dans
le cas de la sélection de variables, d peut être
grand) et L de dimension N \times N
(pour un problème d'apprentissage semi-supervisé, N
peut être grand). Heureusement, le calcul pour ces deux
dernières matrices peut être fait en amont.
X \in \mathbb{R}^{N, d}J, diagonale, indicatrice des données labelliséesY \in \mathbb{R}^{N, m}\alpha > 0,
\beta > 0,
\gamma > 0,
\delta > 0o \in \{1, ..., m\}
matrice Laplacienne du graphe des individus, L \in
\mathbb{R}^{N, N}B : matrice diagonale rectangulaire
W \gets \left[X' J X + \epsilon I\right]^{-1} X'JYBV \gets X WD_W \gets I_{d}D_B \gets I_{m}C_W \gets \rho (X'X) + \gamma \max (D_W)W \gets W - \frac 2 {C_W} (X' (XW - V) + \gamma D_W W)\forall j, \quad {D_W}_{j, j} \gets \frac 1 {2 \left\|W_{j, .}\right\|_2}C_V \gets 1 + \left(\alpha + \beta \rho (L)\right) \rho (BB')V \gets V - \frac 2 {C_V} (V - X W + \alpha JVB' - \alpha JYB' + \beta L V B B')C_B \gets \alpha \rho (V'JV) + \beta \rho (L) \rho (V'V) + \delta \max (D_B)B \gets B - \frac 2 {C_B} (\alpha V'(JVB - JY) + \beta V'LVB + \delta D_B B)\forall l, \quad {D_B}_{l, l} \gets \frac 1 {2 \left\|B_{., l}\right\|_2}
les variables sélectionnées sont les lignes
de W de norme minimale
les labels sélectionnés sont les colonnes de B
de norme minimale
Algorithme RSMS : sélection de variables
Étude expérimentale
Pour évaluer la pertinence de notre approche de sélection de
variables et de labels, nous proposons une étude expérimentale
qui met en concurrence RSMS avec d’autres
algorithmes de sélection de variables multi-labels adaptés à la
régression, SFUS, RFS
et MIFS.
L'algorithme MIFS est l'algorithme sur lequel nous
nous sommes fondés. Il reprend la sélection de variables
multi-labels semi-supervisée pour la régression
, et son optimisation est également
effectuée par descente de gradient alternée.
W \in \mathbb{R}^{d, o},
V \in \mathbb{R}^{n, o},
B \in \mathbb{R}^{o, m}
\left\|XW - V\right\|_F^2
+ \alpha \left\|Y - VB\right\|_F^2
+ \beta \mathrm{tr} \left(V'LV\right)
+ \gamma \left\|W\right\|_{2, 1}
L'algorithme RFS utilise la norme l_{2, 1}
exclusivement dans la fonction objectif. Ceci permet d'ignorer
certains individus pour la construction du
modèle W. Si le jeu de données contient des
anomalies, la sélection de variables est rendue plus robuste de
ce point de vue, d'où son nom, Robust Feature
Selection.
Enfin, l'algorithme SFUS se fonde sur l'idée de
RFS, à savoir l'utilisation de la
norme l_{2,1} pour pouvoir ignorer certains
individus, et une décomposition de rang faible du modèle.
W \in \mathbb{R}^{d, m},
P \in \mathbb{R}^{o, m},
Q \in \mathbb{R}^{d, o}
\left\|XW - Y\right\|_{2, 1}^2
+ \alpha \left\|W\right\|_{2, 1}
+ \beta \left\|W - QP\right\|_F^2
Q'Q = I
Jeux de données utilisées
Les jeux de données utilisés sont les suivants
:
atp1d,
atp7d,
edm,
enb,
oes10,
oes97,
osales,
scpf,
sf1,
sf2,
wq,
comme pour le test de l'algorithme LSMR défini dans
le chapitre précédent.
Algorithmes utilisés
Pour cette étude expérimentale, nous avons sélectionné quatre
algorithmes de sélection de variables multi-labels.
Premièrement, l'algorithme MIFS. Cet algorithme
n'est pas conçu pour l'apprentissage semi-supervisé ; cependant
sa fonction objectif ainsi que son algorithme d'optimisation
peuvent très simplement utiliser l'information de tous les
individus, y compris ceux non labellisés. C'est cette version
que nous avons utilisée pour la comparaison. À cet algorithme,
nous ajoutons deux algorithmes de sélection de variables
multi-labels, l'algorithme SFUS et l'algorithme RFS décrit ci-dessus.
Puisque notre approche est destinée à effectuer de la sélection
de variables, nous devons tester les performances d'un
algorithme de régression multi-labels quelconque qui apprendrait
avec différents sous-ensembles des variables (et éventuellement
des labels) sélectionnés. Étant donné qu'il faille effectuer un
apprentissage différent pour chaque sous-ensemble de variables
et chaque sous-ensemble de labels, sans possibilité de
réutilisation des valeurs des hyperparamètres, nous avons choisi
l'algorithme avec un tuning plus limité. Par conséquent, les
valeurs obtenues ne sont pas exactement les mêmes que pour le
chapitre précédent.
Protocole expérimental
Pour chaque algorithme et chaque jeu de données, on recherche
les valeurs optimales des hyperparamètres en suivant une
procédure de tuning optimisant la valeur moyenne de la métrique
aRMSE selon une validation croisée à 10 folds. Une fois ces
hyperparamètres déterminés, les variables (et dans le cas de
RSMS, les labels) sont triés par ordre
d'importance.
L'évaluation de la sélection de variables s'effectue de la façon
suivante. Pour une certaine fraction de variables, pour chaque
algorithme, on détermine les valeurs des hyperparamètres de
l'algorithme d'évaluation LSMR en suivant une
recherche aléatoire qui minimise l'erreur aRMSE moyenne sur les
10 folds de la validation croisée. La partie de test réservée
pour chaque jeu de données permet d'évaluer
l'algorithme LSMR. Le nombre d'individus labellisés
est fixé à 30%. L'opération est répétée 10 fois avec différents
ensembles de test et différents individus labellisés.
Évaluation de la sélection de variables
Nous avons tout d'abord étudié la performance de la sélection de
variables pour les différents algorithmes sur les différents
jeux de données. En fixant le nombre de labels conservés à 100%,
et le nombre d'individus labellisés à 30%, on obtient une courbe
pour chaque jeu de données, pour la métrique aRMSE
.
Les résultats sont agrégés dans la table
. Nous avons pour
chaque jeu de données, chaque algorithme, et chaque pourcentage
de variables conservées, calculé le rang de chaque algorithme
(entre 1 et 4). Nous montrons le rang moyen de chaque approche
sur l'ensemble des pourcentages de variables sélectionnées.
Rang moyen de LSMR après sélection de variables
multi-labels
Jeu de données
RSMS
MIFS
SFUS
RFS
atp1d
1.9 [1]
2.1 [2]
3.2 [4]
2.8 [3]
atp7d
2.5 [2]
3.2 [4]
1.3 [1]
3.0 [3]
edm
1.8 [1]
3.2 [4]
2.3 [2]
2.7 [3]
enb
2.3 [2]
3.4 [4]
1.8 [1]
2.5 [3]
oes10
2.8 [3]
2.2 [2]
3.0 [4]
2.0 [1]
oes97
2.5 [3]
3.6 [4]
1.8 [1]
2.1 [2]
osales
2.8 [4]
2.0 [2]
1.25 [1]
2.4 [3]
scpf
2.1 [1]
2.4 [2]
3.1 [4]
2.4 [3]
sf1
1.9 [1]
2.7 [3]
3.4 [4]
2.0 [3]
sf2
2.3 [2.5]
1.7 [1]
3.7 [4]
2.3 [2.5]
wq
1.7 [1]
2.6 [3]
2.4 [2]
3.3 [4]
Si l'on calcule le rang moyen de chaque algorithme sur toutes
les fractions de variables sélectionnées et tous les jeux de
données, on obtient le résultat suivant :
RSMS : 2.21
RFS : 2.50
SFUS : 2.55
MIFS : 2.70
Évaluation de la sélection de variables par LSMR
La figure montre les résultats
obtenus pour chaque jeu de données. On observe les faits
suivants :
Pour atp1d,
atp7d,
edm,
enb,
scpf et sf1, la courbe d'erreur a un
minimum global en ne sélectionnant qu'un certain nombre de
variables. Pour edm, le choix de la première
variable sélectionnée est très important.
Pour oes10,
oes97,
sf2 et wq, la sélection de variables
n'est pas pertinente puisque l'erreur minimale s'obtient en
sélectionnant toutes les variables, quelle que soit l'approche
étudiée.
Pour osales, la sélection de variables est très
mauvaise pour RSMS. Pour les autres jeux de données pour
lesquels la sélection de variables est
pertinente, atp1d, atp7d,
edm, et enb obtiennent le minimum
global avec RSMS. sf1 observe le
minimum global avec RFS, et scpf
avec MIFS (0.9575 pour MIFS contre
0.9581 pour RSMS).
Sélection de labels
Pour la sélection de labels, nous cherchons à observer quels
sont les labels qui sont les plus faciles à apprendre. Pour ce
faire, on garde 30% des variables pour l'apprentissage, et on
évalue la performance de l'algorithme LSMR en ne
conservant que 20%, 40%, 60%, 80% et 100% des labels.
Évaluation de la sélection de labels de RSMS
par LSMR
La figure montre la courbe de
sélection de labels pour chaque jeu de données. On retrouve
différent cas de figure :
Pour atp1d, atp7d, enb,
osales et wq, la sélection de label
permet de trouver un nombre de labels pour lequel l'erreur est
minimale, de sorte qu'en sélectionnant moins de labels
l'erreur augmente et en en sélectionnant plus l'erreur
augmente également.
Pour oes10, scpf
et sf1, l'erreur est minimale si l'on ne garde
que le nombre minimum de labels.
Pour edm, oes97 et sf2,
sélectionner tous les labels donne une erreur de régression
plus faible.
Sélection de labels au service de la sélection de variables
Concrètement, si certains labels ne peuvent pas être bien
expliqués globalement par les variables en jeu, ils sont
simplement ignorés dans la sélection de variables. Dans ce cas,
nous comparons le résultat de l'apprentissage en conservant 80%
des labels, contre le résultat pour 100% des labels. Dans le cas
où le jeu de données a moins de 5 labels, on en conserve moins,
pour observer une différence :
pour edm et enb, on ne conserve
qu’un label ;
pour scpf, sf1
et sf2, on en conserve 2 ;
Comparaison de la sélection de variables pour tous les labels,
et pour un nombre restreint de labels
La figure montre la différence entre
la sélection de variables seule et la sélection de variables
avec sélection de labels. Les courbes obtenues indiquent
qu'éliminer 20% des labels donne une meilleure erreur de
régression. Les exceptions sont enb, d'une part,
et oes10, oes97 et sf2
d'autre part, pour lesquels la sélection de variables n'est tout
simplement pas pertinente. Le fait que les courbes semblent
simplement translatées en sélectionnant les labels, sans changer
la position du minimum, indique que les variables sélectionnées
ne sont pas pertinentes pour les labels ignorés, ce qui était le
but de notre approche.
Convergence de l'algorithme
Dans cette section, nous vérifions expérimentalement que notre
approche converge en 100 itérations, ce qui est utilisé pour
l'obtention de l'ordre des variables et des labels, comme
utilisé dans les deux sections précédentes.
Courbes de convergence de l'algorithme de sélection de
variables *RSMS* avec écart-type
La figure montre les résultats
obtenus pour chaque jeu de données. On observe les faits
suivants :
La méthode converge en moins de 100 itérations.
La convergence s'observe entre 10 itérations
(pour osales) et 50 itérations
(pour wq)
Pour les jeux de données sf1
et sf2, la convergence s'opère très rapidement,
mais la fonction de coût reste importante.
Conclusion
Dans ce chapitre, nous avons proposé un algorithme de sélection
de variables pour la régression multi-labels en mode
semi-supervisée. Nous avons utilisé l'hypothèse selon laquelle
la sélection de labels peut être au service de la sélection de
variables.
Nous avons montré expérimentalement que notre approche est
compétitive avec l'état de l'art de sélection de variables en
régression multi-labels. Nous avons également montré la
pertinence de la sélection de labels, pour déduire les labels
dont l'apprentissage est plus facile, ce qui guide la sélection
de variables à de meilleures performances.
Application à l’annotation automatique de pneumatiques
Dans ce chapitre, nous présentons le cadre d'annotation
automatique que nous avons développé pour notre partenaire
industriel Lizeo IT. Dans le cadre de cette thèse, nous sommes
confrontés à un problème réel nécessitant un apprentissage
semi-supervisé multi-labels. Nous évaluons la batterie
d'algorithmes développés pour les deux tâches principales, à
savoir la régression et la sélection de variables. Nous
proposons également une adaptation de ces algorithmes afin de
traiter le problème dans le cas où le nombre d'individus est
important.
Introduction
Étant dans le cadre d'une convention CIFRE, cette thèse doit
proposer un bon compromis entre l'aspect fondamental développé
dans les chapitres précédents et l'aspect applicatif en validant
nos modèles sur les jeux de données de l'entreprise. Ces données
sont de nature textuelle et définissent différentes
caractéristiques sur les pneumatiques.
Présentation de l’entreprise
Le cœur de métier du groupe international Lizeo (et de ses
filiales aux États-Unis, à Shanghai et à Lyon) consiste à
étudier les données relatives à l'industrie automobile, et en
particulier les pneumatiques. L'activité de Lizeo se décompose
en deux axes :
l'activité B2B (Business to
Business), qui consiste à traiter des données telles
que les caractéristiques techniques, les prix, les
évaluations, voire les photos et descriptions, à destination
des entreprises s'intéressant au marché du pneumatique,
l'activité B2C (Business to
Consumer), en particulier représentée par son site
vitrine http://pneu.rezulteo.fr,
un comparateur de pneumatiques à destination du public.
Parmi l'ensemble des données dont dispose Lizeo IT, nous
retrouvons (cf figure ) :
des produits, c'est-à-dire des pneumatiques, avec leurs
caractéristiques techniques, les résultats des tests, ou les
évaluations d'experts ;
des prix, collectés auprès des revendeurs ou par aspiration de
sites vendeurs ;
des données de véhicules associées aux pneumatiques ;
des données des distributeurs, qui permettent notamment de les
identifier et les localiser ;
et enfin, ce qui nous intéresse tout particulièrement, des
avis des consommateurs, présents sur des forums, et les média
sociaux.
Résumé des données collectées par Lizeo dans le cadre de son
activité (communication interne)
Les travaux actuels de l'équipe R&D du groupe portent sur
différents thèmes :
l'analyse textuelle des avis du public et des experts des
produits, dont cette thèse fait partie, mais qui vise aussi à
la découverte automatique de thématiques ;
l'analyse du cycle de vie des produits à partir des volumes de
prix aspirés sur les sites de vente en ligne, afin de savoir
si un pneumatique est récent, ou plus utilisé ;
l'analyse des prix des produits, avec en particulier la
détection d'anomalies dans les séries temporelles, afin de
détecter les problèmes dans l'aspiration des prix des
pneumatiques sur le web (ce qui est préjudiciable pour un
comparateur de pneumatiques) ;
la prédiction de volumes marchés et de prix.
Description du jeu de données
L'entreprise Lizeo IT, dans le cadre de son activité B2B,
propose d'effectuer une veille des pneumatiques dans des
ressources sur le web, telles que des forums, des articles
spécialisés et des tweets. Concrètement, chaque document est un
texte, la plupart étant plutôt courts (note de forum ou tweet),
traitant d'un ou de plusieurs produits.
L'analyse de ces documents est cruciale pour Lizeo. La
perception qu'ont les consommateurs des produits est une donnée
d'importance, tant pour les manufacturiers que pour les
distributeurs.
On peut décrire chaque produit à partir de différentes
caractéristiques, appelées qualifier dans le jeu de
données. Les experts ont identifié de
nombreux qualifier. On peut par exemple citer le
prix du produit, le bruit, la tenue sur route, ainsi que
des qualifier plus précis : la tenue sur route
humide, ou enneigée. Les qualifier sont ainsi
conçus comme une hiérarchie. Il y a de
nombreux qualifier dans le jeu de données, mais
nous avons retenu les 97 qui sont employés plus de 10 fois.
Pour un document donné à propos d'un certain produit, un premier
objectif du traitement consiste à indiquer, pour chaque
qualifier, si celui-ci est pertinent. Concrètement,
si le document comporte un commentaire sur le bruit d'un
produit, il faut indiquer le qualifier "bruit".
Ce problème se traduit en un problème d'apprentissage de
classification multi-labels : l'unité statistique est le
document, les variables descriptives sont des variables
textuelles, et les labels (binaires) sont
les qualifier. Ce problème de classification,
résumé par la figure ,
n'est cependant pas notre objectif principal.
Première étape du traitement du jeu de données Lizeo IT :
apprentissage de classification binaire multi-labels
Si un qualifier est pertinent pour un certain
produit de l'un des documents, la question qui nous intéresse
est la suivante : les termes employés évoquent-ils ce qualifier
d'une façon positive ou péjorative ? Nous définissons pour cela
la tonalité d'une qualification d'un document comme
un nombre réel. Une valeur positive de la tonalité indique un
sentiment positif. Une valeur nulle indique un sentiment neutre,
et une valeur négative un sentiment négatif. Nous traitons ce
problème par un apprentissage de régression multi-labels, figure
.
Apprentissage de régression multi-labels de la tonalité
Traitement des données textuelles
Dans le jeu de données utilisé, il se peut qu'il y ait une
comparaison entre deux produits sur les mêmes critères. Dans ce
cas, on ne verra que la moyenne pour l'apprentissage. Ceci donne
parfois des valeurs non entières pour les labels.
Afin d'évaluer les performances de la sélection de variables et
de la sélection de labels, nous étudions un sous-ensemble des
données regroupant les caractéristiques suivantes :
Il s'agit de documents (appelés parfois posts) en français ;
Les documents sont tous labellisés ;
Il y a 84 907 documents ;
La distribution du nombre de /qualifiers/ est documentée par
la table . On
constate qu'il y a 30 145 documents associés à aucun
qualifier, il ne s'agit pourtant pas d'individus non
labellisés, car nous savons qu'aucun des critères retenus ne
s'applique sur ces documents. Dans notre cadre de régression,
ceci signifie que toutes les tonalités doivent être neutres ;
Les 10 qualifiers les plus fréquents sont résumés dans la
table , ce qui
correspond à 69% de toutes les qualifications.
Distribution du nombre de qualifiers par document
Nombre de qualifiers
Nombre de documents
0
30145
1
31723
2
12372
3
5350
4
2710
5
1321
6
653
7
310
8
160
9
89
10
48
Entre 11 et 37
53
Les labels ont une arborescence. On retrouve :
la réputation d'un produit ;
l’usure ;
la satisfaction du consommateur ;
la sécurité, en évaluant la traction sur route sèche, humide
ou enneigée ;
le prix ;
le confort ;
et même l'esthétique du produit.
Résumé des qualifieurs les plus fréquents parmi les 97
(Cons. feedback est l'abréviation
de Consumer feedback, retour client,
et sat. de satisfaction).
No
Nombre
Nom
Médiane
Moyenne
59
31.82%
Characteristics / Image / Reputation
-1.000
-0.598
483
25.07%
Performances / Wear life / Wear life
0.000
-0.198
52
19.41%
Performances / Cons. feedback / Overall sat.
-1.000
-0.936
549
11.07%
Performances / Safety / Traction
-0.750
-0.538
506
7.99%
Performances / Ride performance / Noise
0.000
-0.163
494
7.68%
Performances / Safety / Handling
-1.000
-0.579
780
6.95%
Performances / Safety / Wet traction
-0.500
-0.419
782
5.72%
Performances / Safety / Snow/Winter traction
-0.667
-0.582
495
5.30%
Performances / Safety / Steering
0.000
-0.090
61
4.78%
Characteristics / Image / Intent to purchase
-1.000
-0.583
21
4.11%
Performances / Safety / Safety
-0.333
-0.386
60
3.87%
Characteristics / Image / Test results
-0.333
-0.572
491
3.61%
Performances / Environment / Environment
0.000
-0.473
58
3.49%
Performances / Cons. feedback / Recommendation
-1.000
-0.720
781
3.12%
Performances / Safety / Dry traction
-1.000
-0.831
132
3.03%
Attitude / Towards tyre type
-0.500
-0.389
488
2.55%
Performances / Wear life / Abnormal Wear
1.000
0.525
487
2.37%
Performances / Toughness/Robustness / <idem>
0.000
-0.055
10
2.23%
Characteristics / Price / Value for money
-1.000
-1.014
484
2.16%
Performances / Wear life / Ageing
0.000
0.404
497
2.12%
Performances / Safety / Stopping distance
0.000
-0.390
489
2.01%
Characteristics / Price / Deal / Discount
-1.000
-0.573
558
2.00%
Performances / Track/Sport perf. / Track perf.
0.000
-0.474
504
1.92%
Performances / Ride perf. / Ride experience
-1.000
-0.616
505
1.65%
Performances / Ride perf. / Ride comfort
-0.500
-0.440
133
1.33%
Attitude / Towards tests
0.000
-0.288
784
1.31%
Performances / Safety / Off road traction
-0.667
-0.546
508
1.29%
Characteristics / Image / Look/aesthetic
0.000
-0.352
La table permet
de faire la remarque suivante : pour les qualifieurs les plus
fréquents, la moyenne est souvent négative, et la médiane n'est
jamais positive. Le fait que la médiane ne soit pas toujours
entière tient aux posts faisant une comparaison de plusieurs
produits, comme expliqué plus haut.
Application de l'algorithme LSMR
Dans le cadre de cette application, nous sommes confrontés à un
jeu de données réel, ce qui pose de nouvelles contraintes. Pour
appliquer l'algorithme LSMR, nous avons dû
effectuer des adaptations de celui-ci afin de pouvoir
fonctionner dans un cas où le nombre
d'individus, N, est très grand. En effet,
l'application de l'algorithme LSMR demande une
décomposition en valeurs propres et vecteurs propres (partielle)
de la matrice noyau, K, de dimension N \times
N. Dans ce cas, on peut appliquer l'algorithme de Lanczos
, qui permet d'obtenir le résultat avec
une complexité de \mathcal{O} (s N ^ 2). La
complexité spatiale, de manière bien plus prosaïque, est
déterminée par la construction et le stockage de la matrice
Laplacienne du graphe, L, et de la matrice noyau,
K, toutes deux de dimension N \times
N.
Afin de pouvoir effectuer une approximation de l'apprentissage
en un temps raisonnable, nous proposons une modification
ensembliste de l'algorithme LSMR adaptée à ce jeu
de données.
Méthode ensembliste : Bootstrap Aggregating
Afin de conserver une valeur de N acceptable, nous
tirons 20 différents sous-ensembles de 4000 points du jeu de
données avec remise, afin d'obtenir 20 jeux de données
différents de taille plus faible. Cette méthode est nommée
Bootstrap Aggregating, ou Bagging.
Comme notre algorithme nécessite un certain nombre
d'hyperparamètres, nous considérons un sous-ensemble de
validation en plus des 4000 points pour le jeu
d'apprentissage. La métrique de validation aRMSE
est calculée pour chaque modèle, ce qui nous permet de
sélectionner les 10 candidats donnant la meilleure erreur de
régression.
La méthode de bagging prévoit de traiter
l'apprentissage d'un modèle par ensemble. La prédiction pour un
nouvel individu s'effectue en prenant la moyenne de la
prédiction de tous les modèles, dans le cas de la régression.
Cette méthode a l'avantage de s'appliquer de manière naturelle dans le
cas de la régression multi-labels.
Stacking
Nous utilisons aussi une deuxième approche d'agrégation, nommée
stacking. Dans cette
approche, on considère un nouveau jeu de données. Dans celui-ci,
l'individu statistique est toujours le même, mais il est décrit
cette fois par les prédictions de chacun des modèles retenus, et
les labels sont les mêmes que pour le jeu d'apprentissage
original.
Étant donné le cadre multi-labels de l'apprentissage original,
nous considérons pour l'apprentissage par stacking
que les labels à ce stade sont indépendants. Pour chaque label,
on cherche donc à prédire la valeur du label en fonction des
prédictions de tous les modèles pour ce label.
Cette étape est également l'occasion de ne considérer dans le
jeu de données que les valeurs pertinentes. En effet, si l'on
revient à la construction du jeu de données, et si un
qualifier (label) n'est pas présent, la valeur
cible sera la valeur neutre, 0. Cependant, cette valeur n'est
pas vraiment pertinente pour l'apprentissage, ce qui pousse le
modèle à apprendre des valeurs faibles. Les prédictions sont
donc naturellement de norme inférieure à la vérité terrain. Pour
compenser ce biais, l'agrégation par label ne retient comme
individus que les posts présentant le qualifier en
question.
Enfin, pour éviter le sur-apprentissage, on ne considère pour
chaque modèle que les individus n'ayant pas servi à
l'apprentissage du modèle de bootstrap. Pour les
tâches de stacking, les valeurs de prédiction de
chaque modèle sur son jeu d'apprentissage sont remplacées par 0.
Le régresseur retenu est une régularisation ridge,
dont le régulariseur est recherché comme une puissance de 10
entre 10^{-4} et 10^{4}.
Résultats
En appliquant l'algorithme, sans effectuer de sélection de
variables, on obtient le résultat présenté en table
. Nous retenons que l'agrégation
par stacking avec régularisation Ridge donne un
meilleur résultat que l'agrégation moyenne.
Application de l'algorithme LSMR,
avec bootstrap, toutes les variables, et les deux
agrégations possibles
Agrégation moyenne
Agrégation Ridge
0.819
0.809
Comparaison d'algorithmes de sélection de variables
Afin d'évaluer la sélection de variables, nous avons sélectionné
20 sous-ensembles de 4000 individus. La valeur des
hyperparamètres est obtenue en minimisant la métrique aRMSE du
modèle final. Nous évaluons deux autres algorithmes de sélection
de variables multi-labels : RFS et MIFS. Nous n'avons pas pu appliquer
l'algorithme SFUS en un temps raisonnable, à cause
de la décomposition en valeurs propres et vecteurs propres d'une
matrice d \times d.
RFS
L'algorithme RFS effectue la
sélection de variables en minimisant le problème suivant :
Ce problème utilise une régularisation l_{2, 1},
mais utilise aussi cette même norme pour la fonction de
coût. Concrètement, cela permet d'ignorer certains individus
pour la sélection de variables.
MIFS
Nous utilisons aussi l'algorithme MIFS, qui est la base de notre approche
proposée. Pour rappel, le problème résolu par MIFS
est la minimisation suivante :
Pour chaque sous-ensemble d'individus, on obtient une liste
ordonnée de variables. Pour calculer la sélection de variables
finale, nous calculons les rangs moyens de chaque variable pour
chaque algorithme. Les premières variables sont listées dans la
table .
Sélection des 30 premières variables pour chaque algorithme.
RSMS
MIFS
RFS
disponible
classement\_adac
silence
d'origine
litres
accrochent
actuels
vii
flottement
sport
def\_90
bluffé
hiver
l'emergency
sécurisant
55
assez\_bon
décroche
véhicule
remonte
aquaplaning
malheureusement
90\_cv
regrette
3
defacyde
azenis
prix
rapprochement
l'abs
205
solidité
négatif
recherche
optimisées
routiers
r16
dois\_prendre
excellents
non
extended
pépère
4
attendant
demi
r17
l'exige
l'esp
été
justifie\_pas
soleil
l'indice
virages\_sans
mou
235
prévenir
confortables
215
promener
châssis
225
financière
catastrophique
marquage
pas\_1
pourri
cherche
carcasses
chauffe
195
écrit\_1
reproche
45
n'avait\_pas
gain
65
s\_max
feeling
vitesse
marketing
fou
charge
225\_75
d'urgence
xl
contrainte
savonnette
svp
moyens
clairement
Qualitativement, les 30 premières variables indiquent un
avantage pour RFS. Les premières variables
sélectionnées par RSMS sont principalement des
éléments de dimension, c'est-à-dire des caractéristiques de
forme des pneumatiques, ce qui n'est pas l'objet de notre étude.
Évaluation de la sélection de variables
Nous pouvons aussi évaluer quantitativement la sélection de
variables. Nous choisissons un sous-ensemble de 4000 points, en
appliquant l'algorithme LSMR non modifié, pour
accélérer les calculs.
Sélection de variables comparée pour avec LSMR non modifié
comme évaluateur
En évaluant le résultat de la sélection de variables
(figure ), on remarque
cependant que c'est bien notre approche qui procure le meilleur
résultat de sélection. En effet, l'erreur de régression est
minimale pour 5% des variables sélectionnées (soit environ 1000
variables), contrairement à MIFS
et RFS dont la sélection n'atteint la meilleure
efficacité qu'en sélectionnant toutes les variables. On remarque
aussi que la courbe de RSMS est plus abrupte
que les autres, ce qui signifie que la sélection est plus
efficace dès les premières centaines de variables sélectionnées.
Nous retenons la valeur des hyperparamètres issus du tuning
pour RSMS :
rang : o = 30 ;
\alpha = 10^{3} ;
\beta = 2.5 \times 10^{-2} ;
\gamma = 4 \times 10^{6} ;
\delta = 4 \times 10^{2}.
Application de RSMS sur l'ensemble du jeu de
données
Étant donné que le jeu de données contient trop d'individus pour
construire et utiliser la matrice Laplacienne du graphe des
individus, nous considérons une version légèrement modifiée de
l'algorithme.
Optimisation par époques
Chaque étape de l'algorithme RSMS est une
itération de la descente de gradient. Il est possible d'utiliser
la version stochastique avec minibatch,
c'est-à-dire qu'au lieu de sélectionner un individu à chaque
itération, un sous-ensemble est sélectionné à la place. Cette
stratégie est souvent employée car elle permet expérimentalement
d'obtenir le résultat en moins d'itération qu'avec la version
stochastique. En contrepartie, le calcul du gradient doit se
faire pour tous les individus sélectionnés simultanément, ce qui
n'est pas un problème pour les architectures de calcul parallèle
modernes .
Afin de pouvoir réutiliser les matrices Laplacienne de graphe,
le partitionnement est le même à chaque époque. Nous obtenons le
résultat pour 10 époques.
Résultats
Les premières variables ainsi obtenues sont exposées dans la
table .
Sélection des 30 premières variables de la sélection de RSMS
par époques
RSMS par époques
très
pas
content
bon
4
sport
bien
meilleurs
plus
neige
top
nokian
satisfait
prix
trop
emoji
3
2
vredestein
route
rapport
mal
excellent
dunlop
hiver
meilleur
bonne
sécurité
5
qualité
Contrairement aux sélections de variables effectuées sur des
sous-ensembles des données
(table ), il est
plus clair que les premiers termes sélectionnés sont applicables
à tous les labels. En effet, dans les 30 premières variables, on
peut repérer les termes suivants :
la combinaison de "
très
" et "
pas
" permet
d'indiquer une tonalité légèrement positive par défaut, et la
modifier en plus positif ou négatif, indépendamment du
label. La variable "
très
" n'est pas présente du
tout dans les 30 premières variables des sélections par
sous-ensemble, et seul MIFS sélectionne
"
pas
" (comme membre d'un
bi-gramme). RSMS par sous-ensembles
sélectionne cependant "
non
". Notons qu'il est très
important de conserver ces mots. Les tâches communes de
classification textuelle, comme la classification multi-labels
de documents, ne sont souvent pas affectées par la présence de
ces mots, qui sont alors considérés
comme stopword (mots-outil) et retirés du
texte. Dans notre cas, ils sont essentiels.
Nous avons relevé les termes d'appréciation généraux dans la
table .
Variables probablement utiles pour la tonalité de tous les
qualifieurs simultanément
RSMS par époques
RSMS
MIFS
RFS
très
malheureusement
assez\_bon
bluffé
pas
non
optimisées
regrette
content
justifie\_pas
négatif
bon
excellents
bien
catastrophique
meilleurs
pourri
plus
reproche
top
gain
satisfait
trop
mal
excellent
meilleur
bonne
qualité
Sélection de variables pour RSMS en comparant
l'optimisation par époques, et l'agrégation de l'optimisation
par sous-ensembles
La figure montre
que l'optimisation par époques obtient son meilleur résultat en
sélectionnant seulement 1% des variables (soit 5 fois moins que
l'agrégation de la sélection par sous-ensemble). Nous retenons
ces 200 meilleures variables.
Sélection de labels
En comparant les normes des colonnes de la
matrice B, on peut trouver les labels ayant une
plus forte norme, et donc ceux les mieux expliqués par les
variables sélectionnées. Grâce à cette information, on peut
identifier les labels difficiles. Nous constatons que les labels
fréquents ont plus tendance à être sélectionnés que les labels
moins fréquents. Pour les autres cas, nous présentons dans la
table la liste
des labels présents dans moins de 1% des documents, et dans la
table la liste des
labels présents dans plus de 1% des documents. La
table montre la
liste des qualifieurs relativement rares qui sont bien
représentés par le champ lexical sélectionné, tandis que la
table montre que
certains labels fréquents sont ignorés pour la sélection de
variables. On note que l'image des produits est bien
retranscrite, ainsi que les caractéristiques techniques les plus
précises.
Rang de sélection des labels présents dans moins de 1% des
documents, parmi les 30 meilleurs labels
No
Rang
Description
65
9
Characteristics / Labelling / Braking on wet surfaces
135
10
Attitude / Towards brands / Towards asian and budget brands
54
11
Characteristics / Image / Origin
136
13
Attitude / Towards brands / Towards premium brands
Application : algorithme LSMR après sélection de variables et
de labels
Pour terminer, nous appliquons
l'algorithme LSMR avec bagging sur
les deux sous-ensembles de variables obtenus auparavant : les
993 variables de la sélection de l'agrégation de l'algorithme
RSMS, et les 199 variables de la sélection
de RSMS par époques. Nous ajoutons également
les 993 et 199 meilleures variables selon RFS
et MIFS. Le résultat est présenté dans la table
. Pour rappel, effectuer
l'apprentissage pour toutes les variables
avec LSMR donne une métrique aRMSE de 0.809.
Le processus général pour l'apprentissage est résumé dans la
figure . Une
première étape consiste à appliquer la sélection de variables
avec RSMS, en effectuant un découpage par
mini-batch. Une fois la liste des variables obtenues,
l'application de LSMR sur des sous-ensembles
tirés avec remise permet d'obtenir plusieurs modèles, chacun
étant évalué sur un ensemble de validation afin d'obtenir une
métrique. Nous obtenons également un ensemble hors du sac
(out of bag), non utilisé pour l'apprentissage ou
la validation, avec la sortie du modèle. La métrique obtenue par
validation permet de sélectionner les modèles les plus
pertinents. L'agrégation s'effectue ensuite en cherchant à
prédire pour chaque label indépendamment, sa valeur à partir des
valeurs prédites par les modèles de bootstrap. Afin de ne pas
réutiliser les individus ayant servi à l'apprentissage ou à la
validation, la valeur de ceux-ci est remplacée par la valeur de
prédiction moyenne. On obtient donc les variables à identifier,
des modèles de bootstrap, et un modèle de stacking.
Pour l'application du modèle sur un nouveau post, les étapes
sont décrites dans la figure
. Les mots du texte
correspondants aux variables sélectionnés sont reconnus, puis
chaque modèle de bootstrap effectue une prédiction, et enfin le
modèle de stacking permet d'obtenir une valeur pour tous les
labels.
Évaluation avec LSMR + bagging (aRMSE) des
deux ensembles de variables retenus : agrégation
de RSMS sur des sous-ensembles, et
optimisation de RSMS sur le jeu de données
complet par époques
Pourcentage de variables
RSMS par époques
RSMS agrégé
RFS
MIFS
5% (993 variables)
0.810
0.807
0.815
0.819
1% (199 variables)
0.810
0.812
0.817
0.820
Schéma de synthèse de l'application de RSMS
et LSMR sur le jeu de données total
Schéma de synthèse de l'application de RSMS
et LSMR sur le jeu de données total :
application sur un nouveau post non labellisé
Conclusion
Nous avons évalué notre algorithme de sélection de variables
multi-labels, RSMS, sur un jeu de données
textuel réel, en appliquant notre approche de régression
multi-labels LSMR pour le valider. Selon notre
mode d'application de RSMS, par époques ou en
agrégeant les rangs des variables sélectionnées sur des
sous-ensembles, nous obtenons respectivement une meilleure
sélection de variables qualitativement, et une sélection plus
adaptée au problème, en comparaison avec les
algorithmes RFS et MIFS. Dans le
premier cas, cette évaluation a montré l'utilité de la sélection
de variables pour la réduction de dimension. Dans le second cas,
elle a montré que la sélection de variables permet d'obtenir une
plus faible erreur de régression.
Conclusion et perspectives
Bilan des travaux effectués
Dans cette thèse, nous avons présenté un état de l'art de
l'apprentissage semi-supervisé et multi-labels pour la
régression, en insistant également sur la sélection de
variables. Ceci nous a amené à proposer un algorithme de
régression semi-supervisé, LapS3L.
Cet algorithme utilise les données non labellisées de deux
façons :
une première étape d'extraction de variables non supervisée
permet d'obtenir de nouvelles variables permettant d'exprimer
une relation linéaire entre les variables et la variable
cible. Cette étape est tirée de
l'algorithme SSSL.
une seconde étape qui utilise une régularisation Laplacienne,
semi-supervisée, permettant de relier les variables réelles et
les variables extraites.
LapS3L obtient de bons résultats de généralisation
pour la régression, sur des jeux de données publics, et sur un
jeu de données spécifique.
Afin d'adapter LapS3L aux problèmes de régression
multi-labels, nous avons modifié la régularisation de la seconde
partie en ajoutant un terme multi-labels : concrètement, si deux
labels obtiennent des valeurs similaires sur les mêmes
individus, alors on peut les considérer comme similaires. À
partir de ces similarités entre labels, il est possible
d'utiliser pour la régularisation l'hypothèse suivante : si deux
labels sont similaires, alors les modèles servant à effectuer
leur prédiction doivent être similaires.
Nous avons montré que l'algorithme résultant, LSMR,
est compétitif avec l'état de l'art de la régression
multi-labels, tout en donnant de meilleures performances que la
régularisation multi-labels seule.
Pour faciliter l'apprentissage, nous nous sommes aussi penchés
sur la sélection de variables semi-supervisée et
multi-labels. Étant donné le nombre important de labels que nous
serions amenés à traiter, nous avons proposé un compromis entre
la sélection de variables mono-label et multi-labels en guidant
la sélection de variables par la sélection de
labels. Concrètement, nous avons conçu notre algorithme pour
résoudre simultanément le problème de sélection de variables, et
la sélection de labels, afin que les variables retenues ne
puissent pas être influencées par les labels dont la
modélisation est trop difficile ou impossible.
Enfin, nous avons appliqué LSMR
et RSMS sur un jeu de données réel, de
l'entreprise Lizeo, ayant de nombreuses particularités qui nous
ont amené à adapter légèrement nos travaux. La version retenue
de LSMR utilise la technique de Bootstrap
Aggregating, ou Bagging, qui vise à
ré-échantillonner (avec remise) le jeu de données pour apprendre
un modèle par échantillon, puis une aggrégation des prédictions
par un modèle de stacking. Ce modèle final nous
permet d'ignorer les valeurs non pertinentes, une spécificité du
jeu de données. Contrairement à MIFS
et RFS, les variables sélectionnées
par RSMS permettent soit d'obtenir une erreur de
régression plus faible de LSMR, soit d'obtenir un
modèle très simple.
Perspectives d'amélioration
Les pistes d'amélioration sont nombreuses pour nos travaux.
En ce qui concerne LSMR, nous pourrions tenter
d'utiliser d'autres régularisations multi-labels. En effet,
indépendamment de la performance de LSMR, les
résultats obtenus par la régularisation Laplacienne multi-labels
semblent montrer les limites de cette approche, en comparant
avec la régularisation CMTL. Cette dernière est
similaire, à ceci près que l'a-priori sur la structure des
labels est inféré à partir des données. Nous pourrions également
envisager d'intégrer la sélection de labels dans la méthode
d'apprentissage LSMR, de façon à ne pas
contraindre le modèle sur les labels qu'il ne pourra de toutes
façons pas représenter fidèlement.
Nous pourrions aussi tenter de modifier les a-priori dont nous
disposons sur les labels grâce aux connaissances métier. En
effet, les labels forment une hiérarchie : certains sont plus
génériques et recouvrent des sous-labels plus spécifiques. Par
exemple, si le terme "savonnette" est tantôt employé pour la
tenue sur route humide ou sur route enneigée, cela traduit une
proximité naturelle entre ces deux labels. Cette proximité
pourrait être retrouvée en inspectant simplement la hiérarchie
des qualifiers.
Pour RSMS, nous pourrions envisager d'utiliser une
régularisation non convexe, telle que la régularisation
\ell_{2, 1 - 2}.
En ce qui concerne l'application, il reste à harmoniser la
classification et la régression. En effet, le score prédit pour
chaque label n'est pas toujours intéressant ; il ne l'est que si
le qualifier est bien mentionné dans le texte. Bien
que l'agrégation par stacking permette d'ignorer le
score prédit pour les qualifier non présents, les modèles
bootstrap cherchent à obtenir la valeur 0 si le qualifier n'est
pas présent. Cette idée devrait donc être au cœur de
l'optimisation d'un algorithme unifiant la classification et la
régression.
Publications personnelles
Revues internationales
Seif-Eddine Benkabou,
Khalid Benabdeslem,
Vivien Kraus,
Kilian Bourhis,
Bruno Canitia,
Local Anomaly Detection for Multivariate Time Series by
Temporal Dependency Based on Poisson Model, in
revision,
IEEE Transactions on Neural Networks and Learning
Systems
Conférences internationales
Vivien Kraus,
Khalid Benabdeslem,
Bruno Canitia,
Laplacian-based Semi-supervised Multi-Label
Regression., in
International Joint Conference on Neural Networks
(IJCNN).
IEEE, 2020.
Vivien Kraus,
Seif-Eddine Benkabou,
Khalid Benabdeslem,
Frédéric Cherqui,
An improved Laplacian semi-supervised regression, in
IEEE 30th International Conference on Tools with
Artificial Intelligence (ICTAI).
IEEE, 2018. p 564-570.
Conférences nationales
Seif-Eddine Benkabou,
Khalid Benabdeslem,
Vivien Kraus,
Kilian Bourhis
and Bruno Canitia.
Détection contextuelle d'anomalies à partir de séries
temporelles multi-variées à base de modèle de
Poisson,
in
Conférence sur l'Apprentissage automatique (CAp
2019).
Vivien Kraus,
Khalid Benabdeslem,
Frédéric Cherqui,
Régression Laplacienne semi-supervisée pour la
reconstitution des dates de pose des réseaux
d'assainissement,
Extraction et Gestion des Connaissances (EGC18)
EGC 2018.
Travaux en cours
Vivien Kraus,
Khalid Benabdeslem,
Bruno Canitia.
RSMS: Robust Semi-supervised Multi-label feature
Selection for regression.
Preprint, 2021.
A simple algorithm for semi-supervised learning with
improved generalization error bound
Ji, Ming and Yang, Tianbao and Lin, Binbin and Jin, Rong and
Han, Jiawei
Proceedings of the 29th International Coference on
International Conference on Machine Learning
835--8422012
Manifold regularization: A geometric framework for learning
from labeled and unlabeled examples
Belkin, Mikhail and Niyogi, Partha and Sindhwani, Vikas
Journal of machine learning research7Nov2399-24342006Semi-Supervised Learning978-0-262-03358-9http://mitpress.universitypressscholarship.com/view/10.7551/mitpress/9780262033589.001.0001/upso-97802620335892017-10-05The MIT PressChapelle, Olivier and Scholkopf, Bernhard and Zien, Alexandersep200610.7551/mitpress/9780262033589.001.0001
Semi-Supervised Learning Using Gaussian Fields and Harmonic
Functions
Zhu, Xiaojin and Ghahramani, Zoubin and Lafferty, John D
Proceedings of the 20th International conference on Machine
learning (ICML-03)
912-9192003
A graph Laplacian based approach to semi-supervised feature
selection for regression problems
12109252312http://linkinghub.elsevier.com/retrieve/pii/S092523121300153710.1016/j.neucom.2012.10.028en2017-10-06NeurocomputingDoquire, Gauthier and Verleysen, Micheldec20135--13
Soft-constrained Laplacian score for semi-supervised
multi-label feature selection
470219-1377, 0219-3116http://link.springer.com/10.1007/s10115-015-0841-810.1007/s10115-015-0841-8en12017-10-03Knowledge and Information Systems
Alalga, Abdelouahid and Benabdeslem, Khalid and Taleb, Nora
apr201675-98
Kernelized Constrained Gaussian Fields and Harmonic
Functions for Semi-supervised Learning
Graph-based semi-supervised learning (SSL) methods are
effective on many application domains. Despite such an
effectiveness, many of these methods are transductive in
nature, being uncapable to provide generalization for the
entire sample space. In this paper, we generalize three
existing graph-based transductive methods through kernel
expansions on reproducing kernel Hilbert spaces. In
addition, our methods can easily generate an inductive model
in a parameter-free way, given a graph Laplacian constructed
from both labeled and unlabeled examples and a label
matrix. Through experiments on benchmark data sets, we show
that the proposed methods are effective on inductive SSL
tasks in comparison to manifold regularization methods.
enSousa, Celso A R
2020 International Joint Conference on Neural Networks
(IJCNN)
1--82020IEEE
Semi-supervised multi-label learning by constrained
non-negative matrix factorization
6https://vvvvw.aaai.org/Papers/AAAI/2006/AAAI06-067.pdf2017-10-09
Proceedings of the 21st national conference on Artificial
intelligence-Volume 1
Liu, Yi and Jin, Rong and Yang, Liu2006421-426Berlin, Heidelberg
Constrained Laplacian Score for Semi-supervised Feature
Selection
6911978-3-642-23779-9 978-3-642-23780-5http://link.springer.com/10.1007/978-3-642-23780-5_232017-10-05
Machine Learning and Knowledge Discovery in Databases
Springer Berlin HeidelbergBenabdeslem, Khalid and Hindawi, Mohammed
Gunopulos, Dimitrios and Hofmann, Thomas and Malerba, Donato
and Vazirgiannis, Michalis
201110.1007/978-3-642-23780-5_23204--218Semi-Supervised Multi-Task RegressionZhang, Yu and Yeung, Dit-Yan
Machine Learning and Knowledge Discovery in Databases
617--6312009Springer
Labeled data are needed for many machine learning
applications but the amount available in some applications
is scarce. Semi-supervised learning and multi-task learning
are two of the approaches that have been proposed to
alleviate this problem. In this paper, we seek to integrate
these two approaches for regression applications. We first
propose a new supervised multi-task regression method called
SMTR, which is based on Gaussian processes (GP) with the
assumption that the kernel parameters for all tasks share a
common prior. We then incorporate unlabeled data into SMTR
by changing the kernel function of the GP prior to a
data-dependent kernel function, resulting in a
semi-supervised extension of SMTR, called SSMTR. Moreover,
we incorporate pairwise information into SSMTR to further
boost the learning performance for applications in which
such information is available. Experiments conducted on two
commonly used data sets for multi-task regression
demonstrate the effectiveness of our methods.
Multi-Label Informed Feature Selection.
Proceedings of the Twenty-Fifth International Joint
Conference on Artificial Intelligence
Jian, Ling and Li, Jundong and Shu, Kai and Liu, Huan
20161627--1633Support vector regression machines
Drucker, Harris and Burges, Christopher JC and Kaufman,
Linda and Smola, Alex J and Vapnik, Vladimir
Advances in neural information processing systems
155--1611997Optimization Techniques for Semi-Supervised Support Vector Machines91532-4435http://dl.acm.org/citation.cfm?id=1390681.1390688Journal of machine learning researchChapelle, Olivier and Sindhwani, Vikas and Keerthi, Sathiya S.jun2008203--233Semi-supervised support vector machinesBennett, Kristin P and Demiriz, AyhanAdvances in Neural Information processing systems368--3741999
Laplacian embedded regression for scalable manifold
regularization
Chen, Lin and Tsang, Ivor W and Xu, Dong
IEEE transactions on neural networks and learning systems
236902--9152012IEEEH. Scudder
IEEE Transactions on Information Theory,
Probability of error of some adaptive pattern-recognition
machines,
1965113363-37110.1109/TIT.1965.1053799The origins of logistic regressionCramer, JSTinbergen Institute Working Paper2002119/42002Semi-supervised learning for multi-target regressionhttp://link.springer.com/chapter/10.1007/978-3-319-17876-9_12017-10-11International Workshop on New Frontiers in Mining Complex PatternsSpringerLevatić, Jurica and Ceci, Michelangelo and Kocev, Dragi and Džeroski, Sašo20143--18
Pseudo-labeling and confirmation bias in deep
semi-supervised learning
Arazo, Eric and Ortego, Diego and Albert, Paul and O’Connor,
Noel E and McGuinness, Kevin
2020 International Joint Conference on Neural Networks
(IJCNN)
1--82020IEEE
Semi-supervised learning, i.e. jointly learning from labeled
and unlabeled samples, is an active research topic due to
its key role on relaxing human supervision. In the context
of image classification, recent advances to learn from
unlabeled samples are mainly focused on consistency
regularization methods that encourage invariant predictions
for different perturbations of unlabeled samples. We,
conversely, propose to learn from unlabeled data by
generating soft pseudo-labels using the network
predictions. We show that a naive pseudo-labeling overfits
to incorrect pseudo-labels due to the so-called confirmation
bias and demonstrate that mixup augmentation and setting a
minimum number of labeled samples per mini-batch are
effective regularization techniques for reducing it. The
proposed approach achieves state-of-the-art results in
CIFAR-10/100, SVHN, and Mini-ImageNet despite being much
simpler than other methods. These results demonstrate that
pseudo-labeling alone can outperform consistency
regularization methods, while the opposite was supposed in
previous work. Source code is available at
https://git.io/fjQsC.
enCambridge, MA, USANIPS'98Semi-supervised Support Vector Machineshttp://dl.acm.org/citation.cfm?id>3009055.3009107
Proceedings of the 11th International Conference on Neural
Information Processing Systems
MIT PressBennett, Kristin P. and Demiriz, Ayhan1998368--374
Self-training for multi-target regression with tree
ensembles
12309507051https://linkinghub.elsevier.com/retrieve/pii/S095070511730081310.1016/j.knosys.2017.02.014en2020-09-09Knowledge-Based Systems
Levatić, Jurica and Ceci, Michelangelo and Kocev, Dragi and
Džeroski, Sašo
may201741--60New York, NY, USACOLT' 98
Combining Labeled and Unlabeled Data with Co-training
1-58113-057-0http://doi.acm.org/10.1145/279943.27996210.1145/279943.279962
Proceedings of the Eleventh Annual Conference on
Computational Learning Theory
ACMBlum, Avrim and Mitchell, Tom199892--100
Semi-Supervised Regression with Co-Training.
5http://cs.nju.edu.cn/_upload/tpl/00/c5/197/template197/publications/ijcai05.pdf2017-10-12
Proceedings of the 19th international joint conference on
Artificial intelligence
Zhou, Zhi-Hua and Li, Ming2005908--913
Semi-supervised Feature Importance Evaluation with Ensemble
Learning
978-1-4577-2075-8 978-0-7695-4408-3http://ieeexplore.ieee.org/document/6137207/10.1109/ICDM.2011.1292017-10-03IEEE
2011 IEEE 11th International Conference on Data Mining
31--40dec2011IEEE
Barkia, Hasna and Elghazel, Haytham and Aussem, Alex
Semi-supervised feature selection via spectral analysis
http://epubs.siam.org/doi/abs/10.1137/1.9781611972771.752017-10-09
Proceedings of the 2007 SIAM International Conference on
Data Mining
SIAMZhao, Zheng and Liu, Huan2007641--646
Efficient Semi-Supervised Feature Selection: Constraint,
Relevance, and Redundancy
261041-4347
Efficient Semi-Supervised Feature Selection
http://ieeexplore.ieee.org/document/6520860/10.1109/TKDE.2013.8652017-10-05
IEEE Transactions on Knowledge and Data Engineering
Benabdeslem, Khalid and Hindawi, Mohammedmay20141131--1143New York, NY, USACIKM '13
Local-to-global semi-supervised feature selection
978-1-4503-2263-8http://doi.acm.org/10.1145/2505515.250554210.1145/2505515.2505542
Variable-weighting approaches are well-known in the context
of embedded feature selection. Generally, this task is
performed in a global way, when the algorithm selects a
single cluster-independent subset of features (global
feature selection). However, there exist other approaches
that aim to select cluster-specific subsets of features
(local feature selection). Global and local feature
selection have different objectives, nevertheless, in this
paper we propose a novel embedded approach which locally
weights the variables towards a global feature
selection. The proposed approach is presented in the
semi-supervised paradigm. Experiments on some known data
sets are presented to validate our model and compare it with
some representative methods.
2017-10-09
Proceedings of the 22nd ACM international conference on
Conference on information & knowledge management
ACMHindawi, Mohammed and Benabdeslem, Khalid2013
semi-supervised learning, constraints, feature selection,
variable weighting
2159--2168
A unified architecture for natural language processing: Deep
neural networks with multitask learning
Collobert, Ronan and Weston, Jason
Proceedings of the 25th international conference on Machine
learning
160--1672008
A spectral regularization framework for multi-task structure
learning
Argyriou, Andreas and Pontil, Massimiliano and Ying, Yiming
and Micchelli, Charles A
Advances in neural information processing systems
25--322008
Locally weighted projection regression:
An \mathcal{O}(n) algorithm for incremental
real time learning in high dimensional spaces
Vijayakumar, S. and Schaal, S.
Proceedings of the Seventeenth International Conference on
Machine Learning (ICML 2000)
1288-293Stanford, CA2000clmchttp://www-clmc.usc.edu/publications/V/vijayakumar-ICML2000.pdf
Multi-Target Regression via Input Space Expansion: Treating
Targets as Inputs
1040885-6125, 1573-0565
Multi-Target Regression via Input Space Expansion
http://arxiv.org/abs/1211.658110.1007/s10994-016-5546-z12017-10-16Machine Learning
Spyromitros-Xioufis, Eleftherios and Tsoumakas, Grigorios
and Groves, William and Vlahavas, Ioannis
jul2016arXiv: 1211.6581Computer Science - Learning55--98
Comment: Accepted for publication in Machine Learning
journal. This replacement contains major improvements
compared to the previous version, including a deeper
theoretical and experimental analysis and an extended
discussion of related work.
Multi-Task Feature Learningen
Argyriou, Andreas and Evgeniou, Theodoros and Pontil,
Massimiliano
2007
Advances in neural information processing systems
41--48
Regression shrinkage and selection via the lasso
Tibshirani, Robert
Journal of the Royal Statistical Society: Series B
(Methodological)
581267--2881996Wiley Online LibraryA Dirty Model for Multi-task Learningen
Jalali, Ali and Sanghavi, Sujay and Ruan, Chao and
Ravikumar, Pradeep K
Advances in neural information processing systems
23964--9722010Laplacian Score for Feature Selectionen
He, Xiaofei and Cai, Deng and Niyogi, Partha
Advances in neural information processing systems
18507--5142005Zhou, Jiayu and Chen, J and Ye, J201201MALSAR: Multi-tAsk Learning via StructurAl Regularization
Multi-Label Learning with Global and Local Label Correlation
http://arxiv.org/abs/1704.01415en2020-09-17
IEEE Transactions on Knowledge and Data Engineering
Zhu, Yue and Kwok, James T. and Zhou, Zhi-Hua
apr2017arXiv: 1704.01415
Computer Science - Machine Learning, Computer Science -
Artificial Intelligence
Convex Multi-Task Feature Learningen
Argyriou, Andreas and Evgeniou, Theodoros and Pontil,
Massimiliano
Machine learning733243--2722008SpringerSpectral Relaxation for K-means Clusteringen
Zha, Hongyuan and He, Xiaofeng and Ding, Chris and Gu, Ming
and Simon, Horst D
Advances in neural information processing systems
141057--10642001
Clustered Multi-Task Learning Via Alternating Structure
Optimization
en
Zhou, Jiayu and Chen, Jianhui and Ye, Jieping
Advances in neural information processing systems
24702--7102011Analysis of multi-stage convex relaxation for sparse regularization.Zhang, TongJournal of Machine Learning Research1132010Multi-stage multi-task feature learningGong, Pinghua and Ye, Jieping and Zhang, Chang-shuiAdvances in neural information processing systems1988--19962012Multi-Stage Multi-Task Learning with Reduced Rank.Han, Lei and Zhang, YuProceedings of the Thirtieth AAAI Conference on Artificial Intelligence1638--16442016
Feature Selection With \ell_{2,1-2} Regularization
292162-237X, 2162-2388https://ieeexplore.ieee.org/document/8259312/10.1109/TNNLS.2017.2785403
Feature selection aims to select a subset of features from
high-dimensional data according to a predefined selecting
criterion. Sparse learning has been proven to be a powerful
technique in feature selection. Sparse regularizer, as a key
component of sparse learning, has been studied for several
years. Although convex regularizers have been used in many
works, there are some cases where nonconvex regularizers
outperform convex regularizers. To make the process of
selecting relevant features more effective, we propose a
novel nonconvex sparse metric on matrices as the sparsity
regularization in this paper. The new nonconvex regularizer
could be written as the difference of
the \ell_{2,1} norm and the
Frobenius \ell_{2,2} norm, which is named the
\ell_{2,1-2}. To find the solution of the
resulting nonconvex formula, we design an iterative
algorithm in the framework of ConCave–Convex Procedure
(CCCP) and prove its strong global convergence. An adopted
alternating direction method of multipliers is embedded to
solve the sequence of convex subproblems in CCCP
efficiently. Using the scaled cluster indictors of data
points as pseudolabels, we also
apply \ell_{2,1-2} to the unsupervised case. To
the best of our knowledge, it is the first work considering
nonconvex regularization for matrices in the unsupervised
learning scenario. Numerical experiments are performed on
realworld data sets to demonstrate the effectiveness of the
proposed method.
en102020-09-20
IEEE Trans. Neural Netw. Learning Syst.
Shi, Yong and Miao, Jianyu and Wang, Zhengyu and Zhang, Peng
and Niu, Lingfeng
oct20184967--4982Convex and scalable weakly labeled svms14http://www.jmlr.org/papers/volume14/li13a/li13a.pdf12017-10-09The Journal of Machine Learning Research
Li, Yu-Feng and Tsang, Ivor W. and Kwok, James T. and Zhou,
Zhi-Hua
20132151--2188Boca Raton
Chapman & Hall/CRC data mining and knowledge discovery
series
Constrained clustering: advances in algorithms, theory, and applications
978-1-58488-996-0Constrained clusteringCRC Press
Basu, Sugato and Davidson, Ian and Wagstaff, Kiri Lou
2009OCLC: ocn144226504
Cluster analysis, Computer algorithms, Data mining, Data
processing
A Chapman & Hall book."
Transductive inference for text classification using support
vector machines
Joachims, ThorstenICML99200--2091999San Francisco, CA, USAICML '01
Learning from Labeled and Unlabeled Data Using Graph Mincuts
1-55860-778-1http://dl.acm.org/citation.cfm?id=645530.757779
Proceedings of the Eighteenth International Conference on
Machine Learning
Morgan Kaufmann Publishers Inc.Blum, Avrim and Chawla, Shuchi200119--26
Text classification from labeled and unlabeled documents
using EM
Nigam, Kamal and McCallum, Andrew Kachites and Thrun,
Sebastian and Mitchell, Tom
Machine learning392103--1342000SpringerSemi-Supervised linear regressionarXiv preprint arXiv:1612.02391
Azriel, David and Brown, Lawrence D and Sklar, Michael and
Berk, Richard and Buja, Andreas and Zhao, Linda
2016
Amsterdam, The Netherlands, The Netherlands
ECAI'02
Semi-supervised Logistic Regression
978-1-58603-257-9http://dl.acm.org/citation.cfm?id=3000905.3000988
Proceedings of the 15th European Conference on Artificial
Intelligence
IOS PressAmini, Massih-Reza and Gallinari, Patrick2002
machine learning, semi-supervised learning
390--394Semi-supervised regression using spectral techniquesCai, Deng and He, Xiaofei and Han, Jiawei2006
Semi-Supervised Regression with Co-Training
enZhou, Zhi-Hua and Li, Ming6
On semi-supervised linear regression in covariate shift
problems.
16http://www.jmlr.org/papers/volume16/ryan15a/ryan15a.pdf2017-10-10Journal of Machine Learning ResearchRyan, Kenneth Joseph and Culp, Mark Vere20153183--3217
Amit Moscovich and Ariel Jaffe and Boaz Nadler
Aarti Singh and Xiaojin (Jerry) Zhu
Minimax-optimal semi-supervised regression on unknown
manifolds
Proceedings of the 20th International Conference on
Artificial Intelligence and Statistics
Proceedings of Machine Learning Research54933--942PMLR}2017Random decision forestsHo, Tin Kam
Proceedings of 3rd international conference on document
analysis and recognition
1278--2821995IEEENew support vector algorithms
Schölkopf, Bernhard and Smola, Alex J and Williamson, Robert
C and Bartlett, Peter L
Neural computation1251207--12452000MIT Press
Factors influencing the structural deterioration and
collapse of rigid sewer pipes
Davies, JP and Clarke, BA and Whiter, JT and Cunningham, RJ
Urban water31-273--892001Elsevier
Mehdi Ahmadi and Frédéric Cherqui and Jean-Christophe De
Massiac and Pascal Le Gauffre
Influence of available data on sewer inspection program
efficiency
Urban Water Journal118641-656201410.1080/1573062X.2013.831910Harvey, Robert Richard and McBean, Edward Arthur
Predicting the structural condition of individual sanitary
sewer pipes with random forests
Canadian Journal of Civil Engineering414294-303201410.1139/cjce-2013-0431https://doi.org/10.1139/cjce-2013-0431
Learning from normalized local and global discriminative
information for semi-supervised regression and
dimensionality reduction
32400200255http://linkinghub.elsevier.com/retrieve/pii/S002002551500453310.1016/j.ins.2015.06.021en2018-08-14Information Sciences
Zhao, Mingbo and Chow, Tommy W.S. and Wu, Zhou and Zhang,
Zhao and Li, Bing
dec2015286--309
Trace ratio optimization-based semi-supervised nonlinear
dimensionality reduction for marginal manifold visualization
Zhang, Zhao and Chow, Tommy WS and Zhao, Mingbo
IEEE Transactions on Knowledge and Data Engineering
2551148--11612012IEEELille, FranceJournal of Machine Learning Reasearch ProceedingsOn the Optimality of Multi-Label Classification under Subset Zero-One Loss for Distributions Satisfying the Composition Property37https://hal.archives-ouvertes.fr/hal-01234346International Conference on Machine LearningGasse, Maxime and Aussem, Alex and Elghazel, HaythamBach, Francis R. and Blei, David M.jul20152531--2539A survey on multi-output regression5http://onlinelibrary.wiley.com/doi/10.1002/widm.1157/full52017-10-11Wiley Interdisciplinary Reviews: Data Mining and Knowledge DiscoveryBorchani, Hanen and Varando, Gherardo and Bielza, Concha and Larrañaga, Pedro2015216--233Classifier chains for multi-label classificationRead, Jesse and Pfahringer, Bernhard and Holmes, Geoff and Frank, EibeMachine learning8533332011SpringerAn easy-to-hard learning paradigm for multiple classes and multiple labels181The Journal of Machine Learning ResearchLiu, Weiwei and Tsang, Ivor W. and Müller, Klaus-Robert20173300--3337Learning Gaussian processes from multiple tasksProceedings of the 22nd international conference on Machine learningACMYu, Kai and Tresp, Volker and Schwaighofer, Anton20051012--1019Feature-aware Label Space Dimension Reduction for Multi-label Classificationhttp://papers.nips.cc/paper/4561-feature-aware-label-space-dimension-reduction-for-multi-label-classification.pdfAdvances in Neural Information Processing Systems 25Curran Associates, Inc.Chen, Yao-nan and Lin, Hsuan-tienPereira, F. and Burges, C. J. C. and Bottou, L. and Weinberger, K. Q.20121529--1537Adaptive Semi-Supervised Learning with Discriminative Least Squares Regression978-0-9992411-0-3https://www.ijcai.org/proceedings/2017/33710.24963/ijcai.2017/337en2017-10-10International Joint Conferences on Artificial Intelligence OrganizationLuo, Minnan and Zhang, Lingling and Nie, Feiping and Chang, Xiaojun and Qian, Buyue and Zheng, Qinghuaaug20172421--2427Nesterov, Yu200701
Gradient methods for minimizing composite functions
140
Université catholique de Louvain, Center for Operations
Research and Econometrics (CORE), CORE Discussion Papers
10.1007/s10107-012-0629-James Bergstra and Yoshua BengioRandom Search for Hyper-Parameter OptimizationJournal of Machine Learning Research20121310281-305http://jmlr.org/papers/v13/bergstra12a.htmlStatistical Comparisons of Classifiers over Multiple Data Sets71532-4435http://dl.acm.org/citation.cfm?id=1248547.1248548Journal of machine learning researchDemšar, Janezdec20061--30Chen, Jianhui and Zhou, Jiayu and Ye, Jieping20110842--50
Integrating low-rank and group-sparse structures for robust
multi-task learning
10.1145/2020408.2020423
Proceedings of the 17th ACM SIGKDD International Conference
on Knowledge Discovery and Data Mining
Web image annotation via subspace-sparsity collaborated
feature selection
Ma, Zhigang
and Nie, Feiping
and Yang, Yi
and Uijlings, Jasper RR
and Sebe, Nicu
IEEE Transactions on Multimedia1441021--10302012IEEE
Efficient and Robust Feature Selection via
Joint \ell_{2,1}-Norms Minimization
http://papers.nips.cc/paper/3988-efficient-and-robust-feature-selection-via-joint-l21-norms-minimization.pdf
Advances in Neural Information Processing Systems 23
Curran Associates, Inc.
Nie, Feiping
and Huang, Heng
and Cai, Xiao
and Ding, Chris H.
Lafferty, J. D.
and Williams, C. K. I.
and Shawe-Taylor, J.
and Zemel, R. S.
and Culotta, A.
{2010}{1813--1821}Lanczos, Cornelius195010
An Iteration Method for the solution of the Eigenvalue
Problem of Linear Differential and Integral Operators
45
Journal of Research of the National Bureau of Standards
10.6028/jres.045.026Breiman, LeoBagging PredictorsMachine Learning1996Aug242123-140
Bagging predictors is a method for generating multiple
versions of a predictor and using these to get an aggregated
predictor. The aggregation averages over the versions when
predicting a numerical outcome and does a plurality vote
when predicting a class. The multiple versions are formed by
making bootstrap replicates of the learning set and using
these as new learning sets. Tests on real and simulated data
sets using classification and regression trees and subset
selection in linear regression show that bagging can give
substantial gains in accuracy. The vital element is the
instability of the prediction method. If perturbing the
learning set can cause significant changes in the predictor
constructed, then bagging can improve accuracy.
1573-056510.1023/A:1018054314350https://doi.org/10.1023/A:1018054314350Wolpert, David199212241-259Stacked Generalization5Neural Networks10.1016/S0893-6080(05)80023-1Imagenet classification with deep convolutional neural networksKrizhevsky, Alex and Sutskever, Ilya and Hinton, Geoffrey ECommunications of the ACM60684--902017ACM New York, NY, USA
ARPACK users' guide: solution of large-scale eigenvalue
problems with implicitly restarted Arnoldi methods
Lehoucq, Richard B and Sorensen, Danny C and Yang, Chao1998SIAM